
引言
隨著汽車的普及和行駛速度的加快,交通事故及傷亡人數也在逐年上升。在發生汽車碰撞事故時,如何有效地保護司機和乘員生命的安全是迫切需要解決的問題。安全氣囊作為與安全帶配合使用的被動保護裝置已經普及,成為汽車構件中保護乘員的主要裝備之一。
氣囊控制系統可分為機械式、模擬電子式和嵌入式3種類型。對于機械式和模擬電子式控制系統,由于硬件的局限,靈活性受到很大限制,應用日益減少。新一代的氣囊控制系統均為帶微控制器的嵌入式控制系統。嵌入式控制系統的控制算法由軟件實現,極大地提高了系統的靈活性,并具有記錄事故數據和與上位機進行通訊的功能。
汽車的安全氣囊要求能在一個極短的時間內檢測到汽車碰撞事故的發生并控制氣囊啟爆。為了實現上述目標,要求安全氣囊控制系統的微控制器運算能力強、I/O口充足。基于此,選擇高性能的32位微控制器,研究并開發出較為實用的汽車安全氣囊控制系統,具有一定的應用和參考價值。本文在對國內外先進控制系統研究的基礎上,提出了基于ARMCortexM3內核32位微控制器的汽車安全氣囊控制系統的設計方案,并分別進行了臺車和實車試驗。
1 ARMCortexM3內核與微控制器LM3S1138
ARM公司面向低成本應用領域研發出32位CortexM3內核處理器。該處理器有效地利用芯片空間,高度集成了外設,與內核組成了一個片上系統(SoC)。ARMCortexM3處理器結合了Thumb2指令32位哈佛微體系結構。Thumb2技術提高了代碼密度,比32位編碼減少了26%內存使用率,較16位編碼提高了25%性能。通過降低時鐘頻率,提供更低的功耗,降低了研發成本,提高了企業效率。芯片上實現了Tail-Chaining中斷技術,該技術把中斷之間的延遲縮短到6個機器周期,在實際應用中可減少70%中斷。
本系統微處理器選用TI公司基于ARMCortexM3內核的LM3S1138工業級微控制器。其工作溫度范圍是-40~85°C,并具有良好的電磁兼容特性,可應用于汽車電子領域。
2 系統工作原理與設計
2.1 系統的工作原理
安全氣囊控制系統主要由傳感器、自檢電路、觸發電路、通訊電路和報警電路組成,如圖1所示。
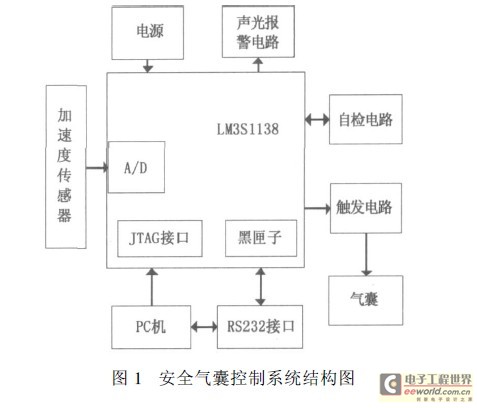
其工作原理為:上電后,系統進行自檢,確定觸發電路是否可以正常工作。若觸發電路存在故障,報警電路進行聲光報警,表明系統無法正常工作,通知駕駛員及時修理。當自檢正常時,通過32位微處理器LM3S1138不斷對加速度傳感器MMA7260測得的信號進行采樣。當汽車受到一定角度內的高速碰撞時,系統在經過算法分析確認之后,立即觸發氣囊包內的點火器,氣囊迅速充滿氣體,阻擋駕駛員與汽車構件之間可能發生的碰撞,通過氣囊上排氣孔的節流阻尼作用來緩沖吸收駕駛員動能,從而達到保護駕駛員安全的目的。
2.2 系統的硬件設計
2.2.1 加速度測量電路
本文選擇飛思卡爾公司的硅電容加速度傳感器MMA7260。它具有信號放大調理、低通濾波和補償功能。該器件的零加速度偏置、滿量程范圍和濾波特性均由制造廠家調定,不需要外接無源元件。由于該傳感器制作工藝上的高集成度和可靠性,最大程度地降低了外界的干擾。MMA7260直接采用IC集成封裝,可直接焊在PCB板上,調試方便。
LM3S1138處理器內置8通道10位ADC,采樣速率可達1M/s,精度足夠用于安全氣囊。傳感器測得加速度后,從相應的輸出管腳輸出電壓值。通過LM3S1138處理器內置的ADC對電壓值進行模數轉換,再存入到軟件設定的數組中。
加速度測量電路的硬件原理圖如圖2所示。
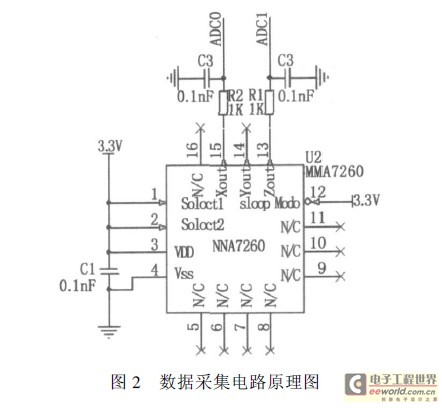
本系統只使用MMA7260三軸加速度傳感的X和Z兩軸來進行水平方向的碰撞判斷。X軸方向測量汽車正面碰撞的加速度,Z軸方向測量汽車垂直方向的加速度。當汽車高速駛過溝、坎路面時,會導致傳感器即使在沒有發生碰撞的情況下,也產生較大信號。此信號疊加在低速碰撞的碰撞波形上,導致微控制器誤認為高速碰撞,進而發生誤啟爆。鑒于此,當汽車Z軸(垂直方向)。產生較大的加速度時,無論X軸方向加速度如何,安全氣囊均設計為不啟爆。避免了因為汽車高速駛過地面路障時,安全氣囊引爆所造成的不必要的損失,增強了路面抗干擾性。
2.2.2 點火觸發電路
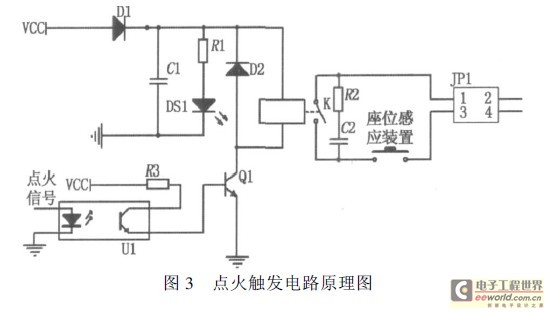
由于氣囊氣體發生器的點爆時需20mA電流脈沖。若直接用LM3S1138的I/O口輸出高電平進行引爆,驅動過小,無法滿足要求。系統選用電磁式繼電器,在LM3S1138輸出口的控制下可驅動大功率的負載。由于繼電器會產生較明顯的干擾,故在繼電器周圍加抗干擾電路的同時與光電耦合器配合使用,使得處理器與觸發電路光電隔離。當碰撞發生時,安全氣囊對身材過于矮小的成年人或兒童不但沒有保護作用,引爆的巨大沖擊力甚至會將其彈死。為了更好地實現安全點火和智能化點火,系統在觸發回路上設置一個座位壓力感應裝置。如果有成年人入座,則裝置閉合,點火電路可正常工作。相反,如果裝置斷開,則表明無人入座或只有矮小成年人或兒童入座,觸發電路不能形成回路。此時,即使汽車發生碰撞且算法發出點火信號,安全氣囊也不爆破。這樣,既防止在無人入座的狀態下引爆氣囊而造成的經濟損失,又避免了氣囊對矮小成年人和兒童造成的傷害。點火觸發電路的原理圖如圖3所示。
2.3 系統的軟件設計
系統采用CortexM3內核處理器簡化了軟件開發環境。
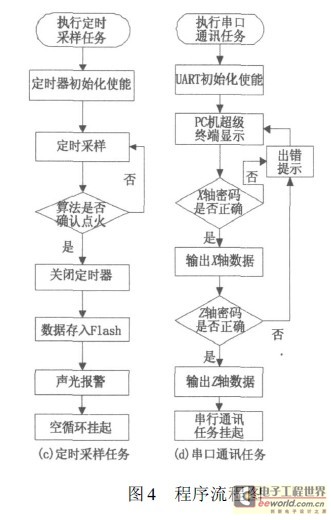
針對LM3S1138等一系列的微控制器,TI官方免費提供了基于C語言(符合ANSIC標準)。的驅動庫,它包含了眾多固件函數庫,對每一個外設都有相應例程,可以很方便地根據應用需要進行修改和移植。因此在軟件編程時,無需匯編程序的軟件管理,完全可以用驅動庫C語言函數進行編程開發。開發應用程序時,利用驅動庫的例程進行模塊化設計,不僅程序編寫方便,而且代碼簡潔且可讀性強。對編寫大型程序而言,采用驅動庫能增強可靠性和安全性,同時降低維護成本。故本系統軟件程序利用TI公司提供的驅動庫例程進行模塊化程序設計,把整個系統程序分為若干個小程序或模塊,分別進行獨立設計、編程和測試。最后將各模塊構建一個完整的工程,完成應用程序設計。將整個工程分成了主程序、啟動任務、定時采樣任務和串行通信任務等4大模塊。流程圖如圖4所示。
2.3.1 主程序模塊
為增加系統的執行效率,實現多任務程序運行,系統通過移植,嵌入了μC/OS-Ⅱ操作系統。程序流程圖中啟動任務模塊為嵌入μC/OS-Ⅱ操作系統時程序常用模式。
2.3.2 啟動任務模塊
在程序運行時,先執行啟動任務,然后根據按鍵情況,執行通訊任務或定時采樣任務。
2.3.3 定時采樣模塊
軟件中實現每1s采樣一次加速度并做A/D轉換,存儲在Flash中。若發生了撞車事故并符合算法的點火條件,記錄當前數據存放地址,適時發出點火指令,啟爆氣囊,同時,再采樣90個數據點。在分析現場時,碰撞前的90個數據和撞車后的90個數據可記錄在LM3S1138內置的Flash中,作為黑匣子信息分析事故原因。
本系統選用加入垂直量的移動窗積分算法。由于篇幅所限,將在后續文章中論述。
2.3.4 串行通訊模塊
事故發生后,PC機通過串行口讀出氣囊控制系統黑匣子中的數據,作為分析事故之用。開發人員可自行設置讀取黑匣子水平方向加速度和垂直方向加速度數據的密碼。
3 性能試驗
目前汽車業內普遍采用的是5英寸(1英寸=254cm)30ms準則來確定安全氣囊的最佳點火時刻。在汽車碰撞過程中,乘員相對于車體向前移動5英寸時刻的前30ms是氣囊的最佳點火時刻。其依據是大多數已系好安全帶的轎車乘員與轉向盤之間的間距為12英寸,氣囊充氣后的厚度為約為7英寸,氣囊從點爆到充滿氣體的時間為30ms。當氣袋充滿氣體的時刻乘員恰好與氣袋接觸,氣囊保護作用最佳。若氣囊點火過早,當乘員接觸到氣囊時,氣囊已泄氣,起不到保護作用。
當氣囊點火過晚,乘員由于慣性前移,氣囊會把乘員打傷甚至致死。所以最佳點火時間是設計安全氣囊控制器的關鍵。而本系統利用積分窗算法和ARMCortex處理器相結合,取得了較好的效果,試驗結果和該準則基本吻合。
3.1 臺車試驗
臺車試驗在南昌大學科技學院汽車碰撞實驗室進行,如圖5所示。碰撞后,乘員身體前移的時刻比碰撞時刻滯后。滯后的大小主要取決于某款車型的吸能性能。由于臺車上只有安全氣囊控制系統,并無任何吸能裝置,吸能幾乎為零。故在本試驗中,認為碰撞時刻即為乘員開始前移的時刻。臺車在滑行軌道上由繩索牽引。時速由40km/h逐漸遞增到60km/h。試驗過程由高速攝像機錄制,通過慢放錄像,測得在碰撞時刻后氣囊打開時刻。數據如表1所示。
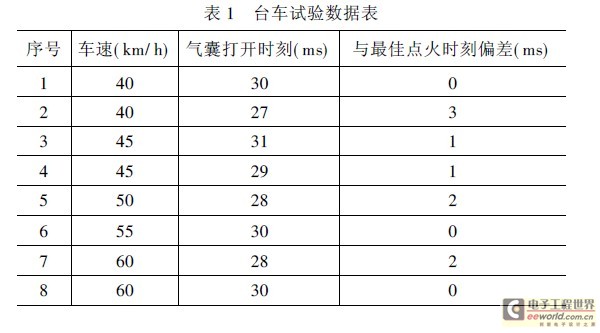
試驗數據表明,氣囊打開時刻與最佳點火時刻偏差很小,在此偏差內不會發生氣囊彈傷乘員或過早漏氣的現象。
3.2 實車試驗
在國家某機動車檢測中心,用某型號國產轎車進行了實車試驗。碰撞類型為正面碰撞。駕駛員座椅上放置了假人,且已系好安全帶。碰撞時速為60km/h。碰撞對象為蜂窩鋁。假人傳感器數采系統采樣頻率為1kHz。通過前期試驗可知,該款車型的吸能形變過程約持續50ms,故在實車試驗前,對氣囊控制系統的程序進行了相應修改。試驗現場錄像截圖如圖6所示。
通過現場放置的高速攝像機錄像的回放,可知乘員在向前移動了30ms后,安全氣囊準確爆破。實車試驗表明,安全系統控制系統可較為準確地控制氣囊的最佳點火時刻。
4 結語
由于安全氣囊要求在極短的時間內對碰撞事故作出處理,因此要求控制系統能在瞬間完成實時處理和復雜運算的過程,即要求其具有較高的運算速度,時滯較小,以適應汽車安全氣囊的實時控制要求。而一般的8位單片機編程簡單,易于應用,但信號處理能力不強。本系統采用基于ARMCortexM3內核的32位高性能微控制器LM3S1138,嵌入μC/OS-Ⅱ操作系統,利用移動積分窗爆破算法,完成了系統設計。臺車試驗和實車試驗表明,本系統可較為準確的控制氣囊的最佳點火時刻,從而有效保護駕駛員的安全。系統軟件設計部分使用了TI官方免費提供的驅動庫,采用模塊化設計,簡化了開發過程。LM3S1138微控制器是片上系統(SoC)。集成了ADC、模擬比較器、flash存儲器等外設資源并且價格低廉,故構建的系統集成度高、體積小、成本低。LM3S1138多達46個I/O口,增加了系統的可擴展性,可在此基礎上研發多級智能型汽車安全氣囊控制系統。