隨著人們對汽車輔助駕駛系統智能化要求的提高和汽車電子系統的網絡化發展,新型的倒車雷達" title="倒車雷達">倒車雷達應能夠連續測距并顯示障礙物距離,并具有通信功能,能夠把數據發送到汽車總線上去。以往的倒車雷達設計使用的元器件較多,功能也較簡單。本文介紹的基于新型高性能超低功耗單片機MSP430F2274的倒車雷達可以彌補以往產品的不足。
系統總體設計
系統采用超聲波測距原理。超聲波測距儀器一般由發射器、接收器和信號處理器三部分組成。工作時,超聲波發射器發出超聲波脈沖,超聲波接收器接收遇到障礙物反射回來的反射波,準確測量超聲波從發射到遇到障礙物反射返回的時間,根據超聲波的傳播速度,可以計算出障礙物距離。作為一種非接觸式的檢測方式,超聲波具有空氣傳播衰減小、反射能力和穿透性強的特點。超聲波測距具有在近距離范圍內有不受光線和雨雪霧的影響、結構簡單、制作方便和成本低等優點。高性能的單片機結合超聲波測距,可以實現功能強大、使用方便的倒車雷達。TI公司的16位單片機MSP430F2274功耗極低,片上資源豐富,同時利用JTAG接口技術,可以對片上閃存方便的編程,便于軟件的升級,非常適合作為倒車雷達系統的微控制器。倒車雷達系統的框圖如圖1所示。
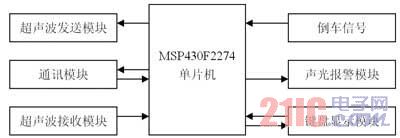
圖1 倒車雷達系統框圖
硬件系統設計
系統以MSP430F2274微控制器為核心,外圍電路由超聲波發射電路、超聲波接收電路、聲光報警電路、通信接口電路、鍵盤液晶顯示電路五部分組成,下面逐一介紹。
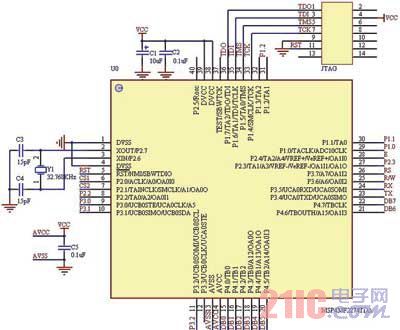
圖2 倒車雷達系統主控電路圖
系統的主控電路圖如圖2所示。本系統中選用的MSP430F2274片內有32Kb閃存和1Kb RAM,因此無須外擴存儲器。外接的32.768kHz晶振作為CPU關閉狀態Basic-Timer的時鐘源,同時也作為系統的車載時鐘使用。
超聲波發送模塊電路如圖3所示,由超聲波產生和發射兩部分組成。超聲波的產生方法有兩種:硬件發生法和軟件發生法。常用的硬件發生法常采用如下方案:超聲波由CD4011構成的振蕩器振蕩產生,經升壓變換推動超聲波換能器而發射出去,振蕩器的起振和停振由單片機來控制。本設計采用軟件發生法,因為通過軟件發生法既可以減少硬件的復雜程度,降低系統的成本,又具有靈活性強、容易實現、穩定性好的優點。本系統利用MSP430F2274單片機的定時器功能來產生穩定的PWM(40Hz)脈沖波,并通過I/O端口P2.3輸出到超聲波發射部分。在超聲波發射電路中CD4049一共包括了6個非門,圖3中線路僅使用了3個,為了防止干擾或被靜電擊穿導致整個CD4049損壞,把沒有使用的那一側的3個非門串起來做接地處理。當控制端輸出一系列固定頻率脈沖時,在壓電陶瓷型超聲波發射換能器UCM-40-T上就固定頻率的加正電壓和反電壓,發出大功率的超聲波,所得到的波形比其他方式效果更理想。
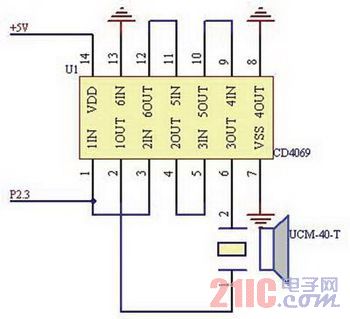
圖3 倒車雷達超聲波發送模塊
超聲波發送模塊電如圖3所示,由超聲波發生和發射兩部門構成。超聲波的發生方式有兩種:硬件發生法和軟件發生法。常用的硬件發生法常采用如下方案:超聲波由CD4011組成的振蕩器振蕩發生,經升壓變換鞭策超聲波換能器而發射出去,振蕩器的起振和停振由單片機來節制。本設計采用軟件發生法,因為經由過程軟件發生法既可以削減硬件的復雜水平,降低系統的成本,又具有矯捷性強、輕易實現、不變性好的長處。本系統操縱MSP430F2274單片機的按時器功能來發生不變的PWM(40Hz)脈沖波,并經由過程I/O端口P2.3輸出到超聲波發射部門。在超聲波發射電中CD4049一共包羅了6個非門,圖3中線僅利用了3個,為了防止干擾或被靜電擊穿導致整個CD4049損壞,把沒有利用的那一側的3個非門串起來做接地處置。當節制端輸出一系列固定頻率脈沖時,在壓電陶瓷型超聲波發射換能器UCM-40-T上就固定頻率的加正電壓和反電壓,發出大功率的超聲波,大學生創業優惠政策所獲得的波形比其他體例結果更抱負。

圖4 倒車雷達超聲波接收模塊
放大器CX20106,它由前置放大器、限幅放大器、帶通濾波器、檢波器、積分器、整型電構成。此中前置放大器具有主動增益節制功能,可以在超聲波傳感器領受較遠反射旌旗燈號輸出微弱電壓時放大器有較高的增益,在近距離輸入旌旗燈號強時放大器不會過載。調節芯片引腳5的外接電阻R3,將它的濾波器的中間頻率設置在40kHz,達到了很好的結果。當領受到與濾波器中間頻率相符的旌旗燈號時,其輸出引腳7輸出一個低電平,而輸出引腳7直接接到MSP430F2274的P2.2上,以觸發間斷。

圖5 倒車雷達聲光報警電路圖
報警模塊采用簡單的聲光報警電路,如圖5所示。先設定一個臨界值,當車尾與障礙物的距離小于設定的最小距離時,紅色指示燈閃亮,綠色指示燈熄滅。單片機向其端口發出PWM脈沖,隨著距離的減小,通過控制PWM脈沖的占空比使閃光和蜂鳴的頻率加劇,以此來提示駕駛員。
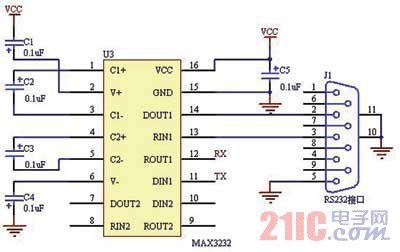
圖6 倒車雷達通信接口電路圖
通信接口電路如圖6所示。采用美信的MAX3232芯片,外圍電路非常簡單,只需要5個0.1μF的電容器。該電路把單片機串口輸出信號隔離變換成 RS-232信號發送到汽車總線上,同時還可以實現該系統與計算機的通信。
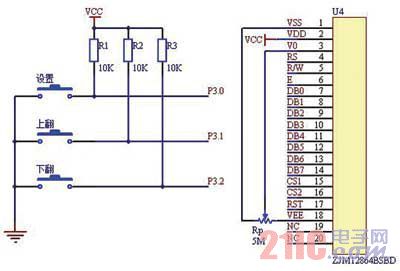
圖7 倒車雷達鍵盤顯示電路圖
鍵盤和顯示電路如圖7所示,由鍵盤和液晶顯示兩部分組成。其中鍵盤采用獨立式按鍵,有3個按鍵,一個設置鍵、一個上翻鍵、一個下翻鍵。可以進行報警值、工作方式、時鐘等各個參數的設置。液晶顯示電路采用ZJM12864BSBD這款低功耗的點陣圖形式LCD,顯示格式為128點(列)×64點(行),具有多功能指令,容易使用,可實時的顯示時鐘、距離和報警提示信息,方便直觀。
系統軟件設計
軟件采用模塊化設計,法式由主法式、測距子法式和鍵盤顯示子法式、時鐘顯示子法式等多個模塊構成,調試過程中對此中每個功能模塊和子法式一一調試大學生創業政策,在每個子法式都完成指定的功能后大學生創業基金寧波大學4支創業團隊獲甬商大學生創投基金投資,再進行綜合調試。系統的軟件流程如圖8所示。
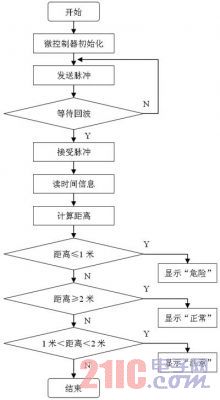
圖8 系統軟件流程圖
超聲波發射電發出超聲波的同時計數器起頭計數,當碰到障礙物反饋旌旗燈號到超聲波領受器領受,經CX20106領受電處置后,發生一個低脈沖,該旌旗燈號傳送給單片機發生間斷,挪用測距子法式,計較出測量距離,挪用顯示子法式,按照分歧的測量數值在液晶上顯示距離和報警。當距離大于2m,顯示“平安”和測量距離,繼續測量;當距離小于1m時,顯示“”和測量距離,由P1.2位驅動蜂鳴器報警;當距離小于2m且大于1m時,顯示“注重”和測量距離。為加強抗干擾能力,系統持續發射超聲波測量三次,從中剔除最大最小值,取中心值計較出切確的距離。如許每秒可測約三個數據,仍然可以知足及時性要求。
結語
該倒車雷達采用了高機能的MSP430F2274單片機,并充實操縱了其片上資本使得系統功能豐碩,利用的外圍芯片削減,系統靠得住性獲得提高。該倒車雷達應用于汽車中,當駕駛員倒車時,從液晶顯示屏上一目了然便知道障礙物離車的距離,降服了后視鏡小,視野窄的錯誤謬誤,消弭了倒車造成的變亂隱患。
