
說明:
DOPB 器件內部的外圍設備數據接口總線,用于處理器與片內的設備進行數據交換。
DLMB 實現數據交換的本地塊存儲器總線,該總線為處理器內核與塊存儲器(BRAM) 之間提供專用的高速數據交換通道。

IOPB 用于實現外部程序存儲器的總線接口。當程序較大時,需要外接大容量的存儲器,該總線提供讀取指令的通道。
ILMB 用于取指令的本地存儲器總線,該總線與器件內部的塊存儲器(BRAM) 相連,實現高速的指令讀取。
MFSL0. . 7 主設備數據接口, 提供點對點的通信通道。
SFSL0. . 7 從設備數據接口, 提供點對點的通信通道。
2 EDK開發流程
EDK( Embedded Development Kit) 是Xilinx 公司針對FPGA 內部32 位嵌入式處理器開發而推出的開發套件。EDK的工具包中集成了硬件平臺產生器、軟件平臺產生器、仿真模型生成器、軟件編譯器和軟件調試等工具,利用其集成開發環境XPS( Xilinx Platform Studio) 可以方便、快速地完成嵌入式系統開發的整個流程。EDK 以IP core的形式,提供諸如LMB ,OPB 總線接口、外部存儲控制器、SDRAM 控制器、UART 中斷控制器、定時器及其他一些外圍設備接口等資源,利用這些資源,設計者能夠輕松構建一個完善的嵌入式處理器系統,其完整的設計框圖如圖2所示。
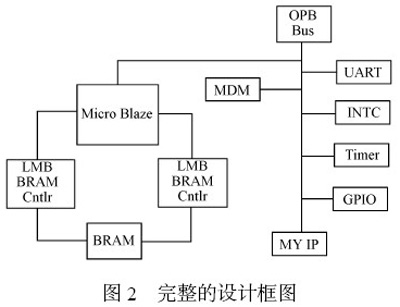
一個完整的嵌入式處理器系統設計通常包括3 個部分: 硬件系統的構建;存儲器映射及軟件的開發;應用程序開發。
在XPS 集成開發環境下,嵌入式處理器硬件系統的構建由微處理器硬件規范(MHS) 文件和微處理器外圍設備描述(MPD) 文件定義; 軟件系統結構由微處理器軟件規范(MSS) 文件定義,其開發流程如圖3 所示。
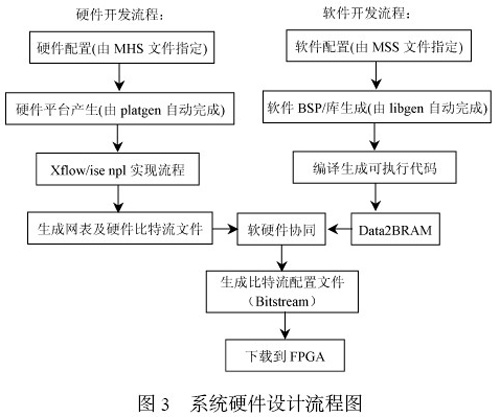
MHS 文件用于描述硬件系統結構,定義處理器類型、總線接口、外設接口、中斷處理和地址空間。該文件可用任意文本編輯器創建,是文本化的原理圖輸入。MPD 文件包含外圍設備的所有有效輸入/ 輸出接口和硬件參數。MSS 文件主要用來定義軟件庫、驅動程序和文件系統。
說明:Data2BRAM 的作用是把軟件代碼文件( 3 .elf) 、FPGA 位流文件( 3 . bit) 和塊存儲器(BRAM) 初始化數據文件( 3 . bmm) 轉換成新的FPGA 位流文件( 3 . bit )和存儲器數據文件( 3 . mem) 。關于應用程序的編寫將在下面的實例中詳細介紹。
3 一個簡單的實例
本實例基于e 元素科技的數字刀劍系列之火龍刀3評估板,簡要敘述一個嵌入式處理器系統的開發流程,著重講述應用程序的編寫。對于其他評估板,只需對用戶約束文件( 3 . ucf) 稍做修改即可。為簡單起見,與圖2 所示一個完整的系統相比,本例所述系統只在OPB 總線上掛MDM(硬件調試模塊) 和GPIO(通用輸入/ 輸出設備) 2 個外圍設備,GPIO 對應評估板上8 個L ED 輸出,當完成下載到FPGA 后,8 個L ED 將不停地閃爍。具體描述如下:
第一步,硬件系統構建,在XPS 集成開發環境下,利用BSP(Base System Builder ) 向導自動創建一個以Mi-croBlaze 處理器為核心的簡單硬件系統,設置處理器時鐘頻率為50 MHz ,總線時鐘頻率為50 MHz ,設置片上讀/寫調試模塊為調試接口,在處理器IP 中,只加入MDM 和GPIO。根據向導逐步操作,即可完成硬件系統的構建。
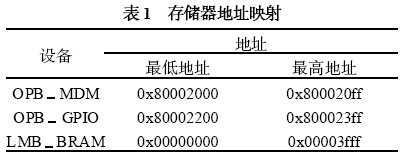
第二步,在硬件系統建立后,利用XPS 的集成工具,完成網表的生成和軟件的配置,存儲器地址映射(默認由系統自動生成,分配的地址隨系統而異) 如表1 所示。驅動配置和存儲器映射的標識符及地址分配包含在文件xparameter s. h 中, 以上兩步具體操作實現細節可參考EDK相關文檔。
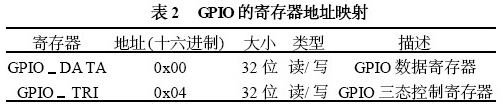
第三步,應用程序的開發。應用程序的編寫使用C 語言,其方法有2 種,第一種是可以采用EDK 提供的應用程序接口函數(API) ,接口函數既多又復雜,不易搞懂;第二種方法是采用訪問硬件的通用方式即簡單的對地址賦值的方式。本例選用后者,要采用地址賦值方式,首先要了解GPIO 的寄存器地址映射,參見表2 。
相關代碼及描述如下:
首先設定一個指針變量,將系統分配給GPIO 的地址賦給指針變量, 即讓指針指向GPIO 的基地址, 也就是GPIO 的數據寄存器( GPIO DATA) ,接著向GPIO 三態控制寄存器寫零(其地址為基地址加上偏移量4 ,即讓指針變量加4) ,將GPIO 設置為輸出,接下來就可以往GPIO數據寄存器送數,以控制8 個L ED 的狀態。
# include " xbasic_types. h"
# include " xparameters. h"
# include " xutil. h"
# include " xgpio_l. h"
# define L ED DELA Y 2000000
void main ()
{
Xuint32 Data = 0xaa ;
int Delay ;
int count = 0 ;
Xuint32 3 ledpt r ;
ledpt r = (int 3 ) 0x80002200 ; / / 指針指向GPIO
*(ledpt r + 4) = 0x00000000 ;
/ / 向GPIO_TRI 寄存器寫零,將GPIO 初始化為輸出
while (1)
{ count + + ;
if (count %2 = = 0)
{
*ledpt r = 0x55 ;
/ / 向GPIO_DATA 寄存器送數,驅動L ED
}
else
{
* ledpt r = 0xaa ;
/ / 向GPIO_DATA 寄存器送數,驅動L ED
}
for (Delay = 0 ; Delay < L ED_DELA Y; Delay + + ) ;
/ / 延時以看清L ED 在閃爍
if (count %2 = = 0)
{
* ledpt r = 0x0f ;
/ / 向GPIO_DATA 寄存器送數,驅動L ED
}
else
{
* ledpt r = 0xf0 ;
/ / 向GPIO_DATA 寄存器送數,驅動L ED
}
for (Delay = 0 ; Delay < L ED_DELA Y; Delay + + ) ;
/ / 延時以看清L ED 在閃爍
}
}