
引言
在高速源同步應用中,時鐘數據恢復是基本的方法。最普遍的時鐘恢復方法是利用數字時鐘模塊(DCM、)產生的多相位時鐘對輸入的數據進行過采樣。
但是由于DCM的固有抖動,在頻率很高時,利用DCM作為一種數據恢復的方法并不一定合適。DCM的這種附加抖動會引起數據有效窗口的相應減小,這樣就會限制高速電路的性能。常用的串行I/O技術需要時鐘數據恢復(CDR)技術,而CDR技術需要模擬的PLL,其局限性是低噪聲容限、高功率損耗及嚴格的PCB布局布線要求。基于對上述缺點的考慮,本文介紹了一種異步數據捕獲技術,它不使用DCM就可以實現數據恢復,所以能獲得更高的速度和性能。
1 設計原理與實現方案
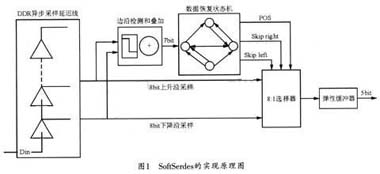
基于FPGA" title="FPGA">FPGA實現SoftSerdes主要由四部分構成:時鐘產生單元、數據抽樣延遲線、數據恢復狀態機和輸出彈性緩沖器。圖1所示是SoftSerdes的實現原理圖。SoftSerdes基本的實現過程是用一個雙倍數據率(DDR" title="DDR">DDR)全局抽樣時鐘對多抽頭延時線的延時數據進行抽樣,它由數據恢復狀態機利用邊沿信息不斷的從多抽頭延時線中選擇有效抽樣,然后把正確的抽樣送給輸出彈性緩沖器。
1.1 時鐘產生單元
用一個320 MHz的時鐘可在雙邊沿抽樣數據并驅動數據恢復狀態機。對320 MHz時鐘進行5分頻得到的64 MHz時鐘可作為串并轉換和并串轉換并的行數據的讀寫時鐘。
1.2數據抽樣延遲線
抽樣延時線的構成如圖2所示。對每個通道的輸人數據均可利用8抽頭的延遲線進行異步抽樣。DDR操作時,每個通道有兩路延遲線:一個用來在上升沿抽樣;另一個用來在下降沿抽樣。每條延遲線都由8個配置為反相器的查找表構成,這樣既可保證上升和下降時間的對稱,也能保證抽樣數據之間的規則分布。但應注意:輸入單元的輸入節點必須以很小的skew到達兩條延遲線。

基于兩種基本的時序約束的時序分析決定了抽頭延時和延時鏈的長度,抽樣延時線的時序分析如圖3所示。而時序約束分最好情況和最壞情況:最好情況的時序約束是整個延遲線的最小值必須大于數據總的抖動數,這個約束決定了抽頭的個數;而最壞情況的時序約束是其最大的抽頭延時值必須小于數據的有效窗口,這個約束決定了延遲線的構成。

最好和最壞情況的數學表達式分別為:tJTT<tTPMIN[(n-2k)+1] 和tVAL>ktTAPMAX ,其中,n是抽頭數,k是數據有效窗口內數據最小抽樣數,tTAPMIN和tTAPMAx是必需的最小和最大抽頭延時,一般情況下,tJTT是總的jitter,tVAL是數據的有效窗口。
1.3數據恢復狀態機
當抽頭延時線對數據進行抽樣時,數據狀態恢復機就對這些抽樣進行處理并最終輸出有效位。邊沿檢測機制是通過分離穿過所有通道的各自檢測結果獲得的,每個通道再對上升沿抽頭延遲線和下降沿抽頭延遲線的8個抽樣進行異或運算以得到每個通道各自的邊沿檢測抽樣。在這個過程中,下降沿信號從180度相位的時鐘域移到0相位的時鐘域,接著邊沿檢測到的上升沿抽樣和下降沿抽樣與先前通道的邊沿檢測抽樣值進行或操作,并把相或的結果送給下一個通道,從而將最后一個通道得到的最后結果送給狀態恢復機。因為不管是上升沿抽樣,每次還是下降沿抽樣都只有一個數據跳變,所以在邊沿檢測抽樣時至少有1bit被提取出來。邊沿檢測機制有四種行為:右移、左移、右跳和左跳。
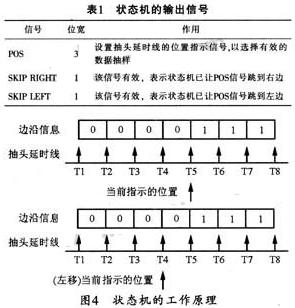
狀態機總是保持至少一個抽樣到數據有效窗口的邊沿。在復位期間,狀態機把抽頭延時線的位置指示信號(POS)放到抽頭延遲線的中央位置,POS信號用來選擇有效數據抽樣。其狀態機的輸出信號如表1所列。在正常運行時,抖動可能會引起數據有效窗口的漂移。狀態機通過邊沿檢測機制不斷的把邊沿抽樣值送到數據有效窗口,并決定POS指示信號和數據有效窗口邊沿間的相對位置。如果POS指示信號離邊沿太近,狀態機則通過右移或左移POS信號對其進行調整,以使POS信號適當的離開邊沿。接著,狀態機會對POS指示信號更新并把更新情況反饋給抽頭延時線。兩個8∶1選擇器可利用POS信號來選擇上升沿抽樣和下降沿抽樣并將其作為有效數據輸出。
狀態機的工作原理如圖4所示,其中0和1為抽樣延時線對數據邊沿的采樣值。
1.4輸出彈性緩沖器
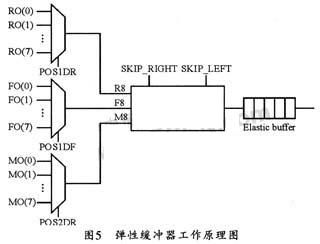
輸出彈性緩沖器的作用是把1 bit 622 Mb/s的數據串化為5 bit/124.4 MHz或8 bit/77 MHz的數據并輸出,每個通道有5 bit或8 bit寬的緩沖器。因為622 Mb/s的輸人數據流會偏離輸入參考時鐘的相位達12UI左右,所以實質上它們是異步的。正因為這個原因,在311 MHz時鐘的每一個周期,其采樣數據不一定是正常的2 bits,而可能在時鐘比數據慢時是3 bits,時鐘比數據快時為1 bit。狀態機產生的POS信號被放置在CLK311的時鐘域,以讓它控制3個8∶1的選擇器來產生R8,F8和M8信號,其中R8是當前有效的上升沿抽樣值,F8是當前有效的下降沿抽樣值,M8是要求3 bits位寬時的R8延時值。具體的跳變情況可通過狀態機的輸出信號右跳(SKIP RIGHT)和左跳(SKIP LEFT)來顯示。而不管是SKIP RIGHT情況下的3bits抽樣數據,還是正常情況下的2 bits抽樣數據,甚至是SKIP LEFT情況下的1 bits抽樣數據,它們都被放入5 bits或8 bits的移位寄存器。彈性緩沖器有5 bit或8 bit的位寬區域,在復位時,讀和寫信號指向緩沖器的中間,緩沖器的初始狀態是半滿的,可以容納盡可能大的相位偏移量。彈性緩沖器的工作原理如圖5所示。
2 仿真
發送方利用fifo造一些數據包,這些數據先經過低速并行數據接口,然后用8b/10b編碼器對該并行數據進行編碼。接著由SoftSerdes模塊對該數據進行并串轉換;而高速串行數據則通過光纜被接收方接收,再通過SoftSerdes模塊對串行數據進行串并轉換.然后用8b/10b解碼器對該并行數據進行解碼,最后得到低速的并行數據,這樣,通過對該數據進行誤碼檢測便可檢測SoftSerdes在實現串/并轉換過程中的誤碼率。
在仿真波形中,發送方可將64Mbps的低速并行數據通過SoftSerdes并串轉換為640 Mbps的高速串行數據,而接收方則可將640Mbps的高速串行數據經SoftSerdes串并轉換為64Mbps的低速并行數據。從仿真結果可以看出,SoftSerdes技術沒有使用傳統的CDR技術,而是通過320 MHz的本地時鐘來采樣數據,從而實現數據的串并轉換。
3 結束語
由于SoftSerdes的整個設計都采用數字電路,所以具有比較高的噪聲容限和比較低的功率損耗,也易于用FPGA對其進行實現,同時也可相對容易地完成產品升級。所以,該方法在通信、控制等需要用大規模FPGA進行設計的產品中有著廣泛的應用前景。