
超聲波測距具有迅速、方便、且計算簡單,測量精度高等諸多特點,因此在倒車雷達、測距儀、移動機器人和農產品無損檢測等廣泛應用。聲納(Sonar)是聲音導航測距(Sound Navigation and Ranging),廣泛用于對水下目標進行探測、定位、跟蹤、通信和導航等。在此,介紹采用SensComp公司600系列高靈敏聲納傳感器和SliconLabrary公司單片機C8051F040設計測量系統。該系統設置有鍵盤和LCD人機操作界面,可提供RS 232和控制器局域網(CAN)兩種總線輸出,方便實際應用。
1 聲納傳感器及測距原理
SensComp 600系列聲納傳感器實物照片如圖1所示,它整合了6500測距模塊和600系列超聲波探頭,探頭中心頻率50 kHz,具有極好的接收靈敏度。觸發方式可選內部觸發(觸發頻率5 Hz)或外部觸發,I/O接口均兼容TTL邏輯電平,正常工作電壓范圍為6~24 VDC。與其他超聲波傳感器相比,其聲波強度的中部明顯大于旁瓣的強度,波束角度15°。
超聲波測距的原理是測出聲波從發射點至目標物體往返傳輸所需的時間,在一定環境下聲波的傳輸速率是不變的。根據式(1)的超聲波測距數學式可測算得到距離。
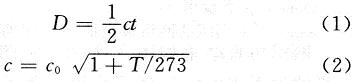
式(1)中:D為聲波發射點與目標物體的距離,(單位為m);t為聲波往返發射點和目標物體的時間。式(2)中:c0為聲波,在0℃時,空氣中的傳播速度為331.4 m/s;T為絕對溫度。
SensComp 600系列聲納傳感器有兩個基本的操作模式:單回波模式和多回波模式。在單回波模式下。輸入引腳INIT電平跳變為高電平時傳感器觸發發送超聲波,然后等待發送的聲波信號返回,最后返回的信號被放大,并且在輸出引腳ECHO輸出高電平。從引腳INIT變為高電平到ECHO跳變為高電平的時間即為聲波從傳感器至障礙物往返所用的時間。若要重復測量只需按上述循環操作。多回波模式即一次觸發多次接收返回的聲波信號。在此模式下,當收到返回信號后,將輸入引腳BLNK輸入持續長于0.44 ms的高電平即可將引腳ECHO變為低電平,接收到下一次回波信號時ECHO又將輸出高電平。SensComp 600系列超聲波傳感器應用于測距時采用單回波模式就能滿足要求。
2 系統硬件設計
該測量系統采用美國SliconLabrary公司單片機C8051F040作中央處理器。C8051Fxxx系列單片機是完全集成的混合信號系統級芯片,具有與8051兼容的微控制器內核,可與MCS-51指令集完全兼容。除了具有標準8052的數字外設部件之外,片內還集成了數據采集和控制系統中常用的模擬部件和其他數字外設及功能部件。C8051F040采用高速、流水線結構CIP-51內核(可達25 MIPS),可以使用標準803x/805x的匯編器和編譯器進行軟件開發,具有強大的功能。如100 kS/s的12位ADC、控制器局域網控制器(CAN),6個捕捉/比較模塊的可編程計數器/定時器陣列、溫度傳感器、可實現硬件的SPI,SMBus/I2C和兩個UART串行接口、64 KB可在系統編程的FLASH存儲器等。其片內JTAG調試電路允許使用安裝在最終應用系統上的產品MCU進行非侵入式(不占用片內資源)、全速、在系統調試,該調試系統支持觀察和修改存儲器和寄存器,支持斷點、觀察點、單步及運行和停機命令。在使用JTAG調試時,所有的模擬和數字外設都可全功能運行。因此選用此單片機完全能滿足設計要求。設計中運用C8051F040的定時器捕捉功能檢測聲波傳輸時間,ADC采集片內溫度傳感器對聲速校正,并有鍵盤和LCD人機作操作界面,FLASH存儲相關設置,同時測量數據通過RS 232和控制器局域網(CAN)兩種總線輸出。硬件結構圖如圖2所示。C8051F040具有6個定時器捕捉模塊,此硬件設計還能擴展至少5個超聲波傳感器,以實現更多功能。

3 系統軟件設計
系統的軟件由主程序、定時器2中斷程序以及PCA捕捉中斷程序組成。主程序主要完成系統的初始化,并從FLASH讀入以前的設置參數。圖3(a)為定時器2中斷程序流程圖和PCA捕捉中斷程序流程圖。定時器2中斷頻率為10 Hz,中斷中讀取按鍵值、CAN總線輸入值和串口UART0輸入值,若這些值與之前的設置不同,則將寫入FLASH中保存。之后程序根據當前的超聲波傳輸時間和環境溫度計算出此次測量距離,并發送至CAN總線和UART0,且在LCD上顯示。PCA捕捉中斷程序,流程圖如圖3(b)所示,主要任務是完成超聲波傳輸時間檢測,PCA設置為上升沿捕捉模式。在超聲波傳感器引腳INIT上升沿起,PCA開始計時,當PCA的引腳跳變為高電平時,即傳感器ECHO變為高電平時計時結束。若超過一定時間仍未收到回波,則放棄本次測量,重新觸發下次測量。

4 系統調試及精度測量試驗
4.1 系統調試
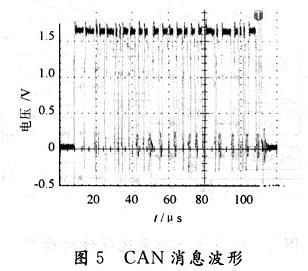
調試采用Tektronix Tds3034B四通道彩色數字示波器中的兩個通道,檢測出傳感器INIT和ECHO兩引腳波形跳變,如圖4所示。可由兩電平跳變之間的時間與單片機檢測時間對比,檢查捕捉計時程序是否準確。系統所測數據由CAN總線發出,調試時通過USB轉CAN接口在電腦上接收到的數據,示波器檢測到CAN總線上波形,如圖5所示。

4.2 測量精度試驗
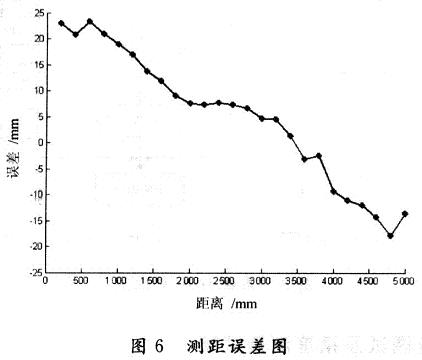
為標定系統測量精度,用200 cm×100 cm×2 cm硬平木板作障礙物進行測量,并用鋼卷尺測量實際距離。系統測量量程為15~1 070 cm。在45~500 cm范圍內進行了誤差分析試驗,其結果如圖6所示。由此可得測量系統的最大誤差為2.34 cm,平均誤差為0.49 cm。
5 結 語
在此,采用SensComp 600聲納傳感器和單片機C8051F040設計實現了聲納測距,系統所需硬件少,測量量程為15~1 070 cm。在45~500 cm范圍內,最大誤差為2.34 cm。系統除用于測距外,還可用于障礙物檢測、傾斜角度測量、車輛定位與導航和液位測量、農業物料檢測等領域應用。 不足之處是單片機C8051F040功能非常多,但在此系統中未充分應用,因此還能利用C8051F040設計更多的功能,來以擴充該系統;此外,該系統的測量誤差相對較大,可以在程序中進行誤差補償等處理,使系統測量精度更高。