
摘 要: 介紹了小區模糊變頻調速" title="變頻調速">變頻調速恒壓控制系統的控制原理、軟硬件設計及仿真結果。
關鍵詞: 模糊控制" title="模糊控制">模糊控制 恒壓供水 變頻調速 單片機
在傳統的小區供水方式中,由于揚水較高且電機一直高速運行,造成的電能消耗比較大,幾乎占到水費成本的一半以上。變頻調速是一項有效的節能降耗技術,節電率很高,一般可節電20%~40%。由于其具有調速精度高、功率因數高等特點,采用它可以提高出水質量、降低物料和設備的損耗,同時也能減少機械磨損和噪聲。
小區用水具有以下幾個特點:(1)用水變化量大;(2)對水壓的要求比較高;(3)流量基本上由用戶控制。針對這些特點,本文提出一種基于模糊控制理論的新型恒壓供水系統。它與傳統的供水系統相比,不但可使水壓保持恒定、節電節水,而且靈活性高、占地面積小、投資省、操作方便、運行可靠,具有良好的經濟和社會效益。
1 系統的控制原理
本系統具備同時控制多臺水泵的功能。根據不同場合、不同需要可以采取多臺水泵同時運行、定時換泵等多種工作方式。水泵電機全部軟啟動,以先啟先停為原則。本系統具有變頻器頻率顯示和實時壓力顯示;具有變頻器故障、遠傳表故障、欠壓超時和水位報警指示。

本系統以單片機為核心,在水泵的出水管道上安裝一個壓力傳感器,用于檢測管道壓力,并把其壓力信號變成0~5V的模擬電信號,送到單片機系統的A/D" title="A/D">A/D轉換器輸入端,經A/D轉換后變成相應的數字信號,送入單片機進行數據處理。經單片機運算后的壓力值與設定的壓力值進行比較,得出偏差值,再經PID調節得出控制參數,然后經D/A" title="D/A">D/A轉換后變成0~10V的模擬信號,送入變頻器控制其輸出頻率的大小,以此改變水泵的電機轉速,從而達到控制管道壓力的目的。當實際管道壓力小于給定壓力時,變頻器輸出頻率升高,電機轉速加快,管道壓力升高;反之,變頻器頻率降低,電機轉速減小,管道壓力降低。如此上下調整多次,直到偏差值為零為止。這樣,實際壓力值圍繞設定壓力值上下波動而穩定,從而保持供水壓力恒定。
2 控制系統的硬件設計
基于單片機的變頻恒壓供水控制系統的硬件結構框圖如圖1所示。系統以AT89C52單片機作為整個系統的控制核心,應用其強大的接口功能,構成整個恒壓供水控制的硬件系統。
本系統硬件主要由A/D轉換器、D/A轉換器、鍵盤、顯示系統、電源、故障檢測電路以及時鐘系統等幾部分組成。各模塊的主要功能如下:(1)A/D轉換器的功能是把水管的壓力信號經傳感器轉換成0~5V的模擬電壓信號,再變成數字信號,然后送入單片機;(2)D/A轉換器的功能是把實際水壓與設定壓力之差經單片機處理后而輸出的數據(8位立即數)轉換成模擬電壓信號,用以控制變頻器的輸出頻率,從而控制電機的轉速,達到控制水壓的目的;(3)鍵盤用于通過人機對話的方式監控系統,例如改變系統的壓力設定值等參數、換水泵的時間、水泵的工作方式等;(4)顯示系統用于顯示系統的工作狀態,如設定的水壓值、實際水壓值、缺水和漏水警報等;(5)故障檢測電路用于監測變頻器、水泵以及蓄水池的狀態。
3 模糊控制器" title="模糊控制器">模糊控制器設計
由于供水系統管網較長,流量變化緩慢,水壓的調節有較大的滯后性,所以難以建立一個精確的數學模型,用傳統的PID調節器難以獲得滿意的效果。模糊PID控制是結合PID控制和模糊控制而得出的一種新型控制方式。模糊控制器的優點是不要求掌握受控對象的精確的數學模型。筆者對模糊PID調節器與傳統的PID調節器進行了Matlab仿真比較,如圖2所示。其中曲線1是PID調節器的仿真曲線,曲線2是模糊PID調節器的仿真曲線。從圖2中可以看出,曲線2的動態響應要比曲線1快得多,而且靜態誤差也比較小。因此,模糊PID控制器在控制過程的前期階段具有模糊控制器的優點(動態響應快),而在控制過程的后期階段又具有PID調節器的優勢(靜態誤差小)。故本文采用的模糊PID控制器比傳統PID調節器具有優越的性能。
從理論上講,模糊控制器的維數越高,控制越精細。但是維數越高,模糊控制規則變的越復雜,控制算法實現起來越困難。基于以上分析,本文采用二維模糊控制器,輸入量為誤差量(E)和誤差的變化量(EC),輸出量為控制量的變化(U)。
E、EC和U的論域被劃分為15個等級,即為:
E={-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}
EC={-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}
U={-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}
模糊子集的劃分及其賦值:
確定描述E、EC和U的模糊語言變量為:負大、負中、負小、零、正小、正中、正大。用符號表示為:NB,NM,NS,ZE,PS,PM,PB。即
E=EC=U={ NB,NM,NS,ZE,PS,PM,PB}
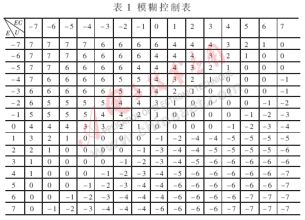
根據小區實際供水情況和操作人員的實踐經驗,總結出模糊控制規則表,由控制規則按模糊推理合成規則求出相應的控制決策U,再按隸屬度最大值的原則得到相應的控制量,經計算機離線計算并反復調試修正,最后得到實際應用的模糊控制表,如表1所示。將該表存于單片機中,系統運行時先根據輸入數據計算出E、EC,然后將它們量化求出模糊量的論域值,接著查找模糊控制表獲得控制量,再乘以比例系數即可得到輸出量,最后將其送到D/A轉換器轉換成模擬量去控制變頻器。系統的模糊控制原理圖如圖3所示,具體的模糊控制子程序流程圖如圖4所示。
?

參考文獻
1 L.A.Zadeh.Fuzzy control:issues,contentions and perspectives. San Franscisco,USA:Proc.of 13th IFAC Word Congress,1996
2 A.Kandel.,G.Langholz.(Eds)Fuzzy control.Prentice Hall,Englewood Cliffs,NJ.,1994
3 胡漢才.單片機原理及其接口技術. 北京:清華大學出版社,2004
4 韓安榮. 通用變頻器及其應用. 北京:機械工業出版社,2000
5 李士勇.模糊控制,神經控制和智能控制論.哈爾濱:哈爾濱工業大學出版社,1997
6 余永權.單片機模糊邏輯控制.北京:北京航空航天大學出版社,1995