
將近一半的嵌入式設計用到FPGA" target="_blank">FPGA,僅次于微控制器。FPGA可用于執行任何膠合邏輯、自定義IP 、計算密集型算法加速器。通過采取一些處理任務, FPGA可以幫助提高系統性能,從而使單片機從周期密集的任務中騰出部分時間。FPGA還提供優良的性能特點和更的靈活性,以適應不斷變化的標準。
基于FPGA的MCU設計有兩種基本實現方式:一種是在FPGA邏輯結構中內置MCU軟核;一種是使用基于離散FPGA的標準MCU產品。FPGA內置軟核有效果,但與標準MCU相比,該方式實現一個微控制器是比較昂貴和耗電的。尤其是使用基于32位ARM的內核。結果,基于FPGA內置軟核的FPGA MCU設計只占三分之一。其余的三分之二是基于離散FPGA的標準微控制器產品。
標準微控制器產品和FPGA都沒有有效的發展兩者之間的通信,甚至使用不同的語言。因此,它們之間的接口將是一種挑戰。FPGA的沒有任何專門的邏輯電路來與微控制器通訊。首先,這種邏輯模塊的設計必須從零開始。其次,微控制器和FPGA之間的通信是異步的。特別是需要使單片機與FPGA時鐘域同步。最后,無論是接口,還是微控制器總線,都存在瓶頸問題。MCU和FPGA之間的信息傳遞通常需要在MCU總線上循環,且通常占用資源(PIO or EBI)影響傳遞速度。因此必須注意避免與外部SRAM或閃存和微控制器總線的瓶頸問題。
MCU的FPGA接口基本上有三種硬件選擇:可編程的I / O(PIO);外部總線接口( EBI的),如果有的話;最后,MCU之間的一個專門的接口,先進的高速總線( AHB )和FPGA 。該方法的使用依賴于高端應用和市場期望。
PIO接口
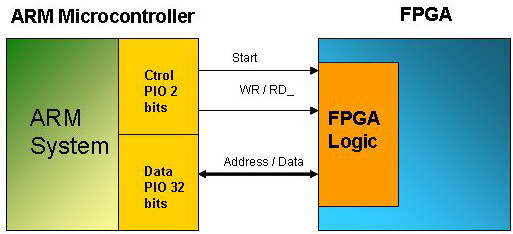
通過PIO 連接MCU和FPGA相對簡單數據傳輸來說比較簡單,包括傳輸32位的地址, 32位數據,還有一些控制信號的控制。這就需要一個32位的PIO和一個2位PIO(圖1) 。
 |
|
圖1 PIO連接FPGA |
為了將數據傳輸到FPGA,PIO中的雙向緩沖器方向必須設置為輸出。數據傳輸到FPGA的軟件算法實現如下:
PIO_DATA = ADDRESS; // Pass the address to write
PIO_CTROL = START | WR; // Send start of address cycle
PIO_CTROL = CLEAR; // Clear PIO ctrl, this ends the address cycle
PIO_DATA = DATA; // Set data to transfer
PIO_CTROL = START; // Data is ready in PIO
PIO_CTROL = CLEAR; // This ends the data cycle
從FPGA讀取數據的方法相似。同樣,PIO中的緩沖區首先必須設置為輸出,然后改變方向為輸入從FPGA讀取數據,下面是執行代碼:
PIO_DATA = ADDRESS; // Set the address to read
PIO_CTROL = START | RD; // Send start of address cycle
PIO_CTROL = CLEAR; // Clear PIO ctrl, this ends the address cycle
PIO_DATA_DIR = INPUT; // Set PIO-Data direction as input to receive the data
DELAY(WAIT_FOR_FPGA); // wait for the FPGA to send the data
DATA_FROM_FPGA = *PIO_DATA; // Read data from FPGA
上述算法是一個基本的傳輸,更先進的算法是必要在ARM微控制器和FPGA之間建立適當的通信。特別要注意的是,確保數據的可靠性,例如沒有因高速或等待周期造成資料遺失等。
訪問時間計算的總和:
T訪問-PIO=t1+處理階段+t2+數據階段
使用最大優化的GCC編譯器,系統大約需要55個AHB周期向FPGA執行寫操作(圖2)。
 |
|
圖2 PIO向FPGA 寫數據 |
假設t2(FPGA的等待響應時間)也大約是25個 AHB周期,系統大約需要85個AHB周期從FPGA進行讀操作(圖3)。
 |
|
圖3 PIO從FPGA讀取數據 |
MCU自身接口連接非常簡單和直截了當。然而,在FPGA里必須用特殊的邏輯來解碼所有的由PIO生成的業務流。在大多數情況下,微控制器的業務流是完全異步。因此,FPGA必須能夠從微控制器中過采樣控制信號;否則,FPGA將錯過時間窗口且業務流將不會最終到達FPGA內。