
1 引言
無刷直流電機" title="無刷直流電機">無刷直流電機采 用電子換向裝置代替了傳統直流電機的機械換向裝置,又具有與直流電機類似的機械特性,其磁鋼置于轉子" title="轉子">轉子上,通過不斷地變換定子繞組通電方式產生旋轉磁場驅動 轉子轉動。由于轉子采用了永磁體結構,無刷直流電機具有體積小、重量輕、結構簡單的特點。隨著電力電子技術的發展,無刷直流電機的應用越來越廣泛。快速有 效地確定位置傳感器" title="位置傳感器">位置傳感器和繞組間的相序" title="相序">相序關系是實現無刷直流電機調速功能的關鍵。
本文通過對三相無刷直流電機傳感器位置、輸出信號與繞組電動勢間的關系進行分析,提出了一種測定其相序的有效方法。
2 無刷直流電機基本控制方法
無刷直流電機的轉子磁鋼呈瓦片形,磁極" title="磁極">磁極與定子繞組間氣隙均勻,氣隙磁場呈梯形分布。定子繞組感應電動勢波形為梯形波。
無刷直流電機定子繞組通常采用三相星形接法,需要應用三相全橋控制電路,其驅動控制系統結構如圖1所示。
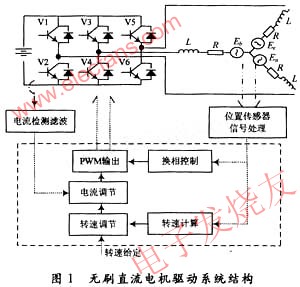
由V1~V6六只功率管構成的驅動全橋可以控制繞組的通電狀態。按照功率管的通電方式,可以分為兩兩導通和三三導通兩種控制方式。由于兩兩導通方式提 供了更大的電磁轉矩而被廣泛采用。在兩兩導通方式下,每一瞬間有兩個功率管導通,每隔1/6周期即60°電角度換相一次,每只功率管持續導通 120°電角度,對應每相繞組持續導通120°,在此期間相電流方向保持不變。為保證產生最大的電磁轉矩,通常需要使繞組合成磁場與轉子 磁場保持垂直。由于采用換相控制方式,其定子繞組產生的是跳變的磁場,使得該磁場與轉子磁場的位置保持在60°~120°相對垂直的范圍 區間。
功率管的換相信號需要從位置傳感器的狀態得出,換相時刻也就是霍爾傳感器的信號狀態改變的時刻。因此霍爾傳感器和三相繞組對應關系的確定對于電機的正確運行非常重要。
3 相序測定的實用方法
3.1 位置傳感器安裝方式
位置傳感器在無刷直流電機控制系統中起著非常重要的作用。它用于檢測轉子磁極的位置,為開關電路提供正確的換相信息。
無刷直流電機常用的位置傳感器是霍爾傳感器,霍爾元件數通常與繞組相數相等,轉子磁鋼作為霍爾元件的勵磁磁場磁極。
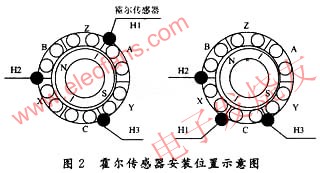
為了產生正確的換向信號,霍爾傳感器安裝位置有一定要求,通常有120°安裝和60°安裝兩種方式,如圖2所示。
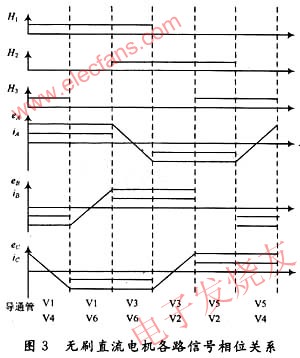
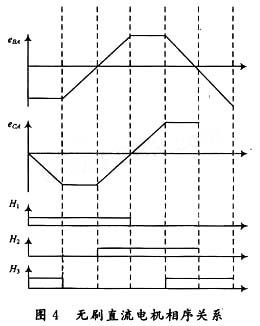
以霍爾傳感器安裝方式為120°為例,位置傳感器輸出波形、電機定子繞組通電電流和反電動勢相位關系如圖3所示。
以位置傳感器的信號狀態區分,將無刷直流電機的運行狀態分割為6個狀態。各功率管導通區間如圖3所示。
兩種位置傳感器安裝方式在本質上是相同的,在電機旋轉過程中,都將360°電角度分割為6種狀態,其中60°安裝方式可以認為是將 120°安裝時的一個霍爾元件反轉180°安裝,各元件換相時刻均相同。在換相控制中,將三個霍爾傳感器的輸出信號狀態的組合作為狀態控 制變量,例如在圖3所示的第一個運行區間內狀態控制變量為H1 H2 H3(101)。在不同安裝方式下各霍爾元件產生不一樣的狀態控制變量。在120°安裝下,3個位置傳感器信號組成的控制變量為001-110。 60°安裝狀況下,將出現000和111的狀態變量,而缺失中間的兩個狀態,因而他們的換相控制表是有區別的。通過觀察霍爾傳感器是否出現111 和000的狀態就可以判定霍爾傳感器是哪種安裝方式。
3.2 相序測定方法
三相星形連接的無刷直流電機,其繞組等效模型如圖1所示。做如下假設,無刷電機三相完全對稱,磁路不飽和,不計磁滯和渦流損耗。三相繞組的電壓平衡方程則如式(1)所示:
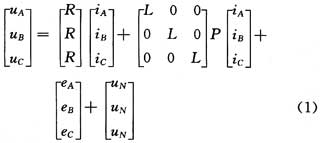
其中uA,uB,uC為相電壓,e為各相繞組反電動勢,i為流過各相繞組的電流,uN為三相繞組中點電壓。L為三相繞組互感與自感的合成電感。
在無刷電機三相繞組均為開路的情況下,即iA=iB=iC=0,我們可以得到下面的結論。
![]()
其中uBA和uCA為三相繞組的線電壓。從式(2),式(3)中可以看到,在三相繞組開路的情況下,上面的兩個量可以用反電動勢表示。
對于反電動勢的相位關系,由圖3中做進一步的推導,可以得出如圖4所示的相位關系。依據這一相位圖,可以清楚地分辨出各位置傳感器與各相繞組間的相位關系,三相繞組間的電位關系也可以判定,根據圖4同樣可以測定三相繞組間的關系。
對于60°安裝的位置傳感器可以按照上面的方法得出類似的相位圖,用于測定相序。
4 實驗驗證
使用一臺無刷直流電機來驗證前文提出的方法。實驗電機型號為:57BL-3030H1-LS-B。額定轉速為3 000 rpm,極對數為5,采用開關霍爾傳感器作為位置傳感器,位置傳感器為120°安裝方式。
在實驗中,首先確定任一繞組作為A相參考繞組,轉動電機,用示波器測量另外兩相與A相間線電壓的相位關系,得到的線電壓波形如圖5所示。對比圖4,兩個線電壓波形的相位領先的則為uBA,據此可以快速確定B相和C相。
然后以銘uBA為參考相位,分別測量三個霍爾傳感器與uBA的相位關系,其中一個波形如圖6所示。對比圖4,可以確定此位置傳感器為A相繞組所對應,另兩個位置傳感器以同樣的方法確定。
5 結語
本文提出僅通過對電機進行簡單測量即可快速有效確定無刷直流電機相序的測定方法,實驗驗證了該方法是有效的。