
1 引言
本文設計了以串級調節為基礎,對汽溫對象進行系統辨識,利用神經網絡進行建模,并加入中間點溫度作為前饋信號的控制方案,并利用單純形法對PID參數尋優,用以檢驗智能算法在控制系統中應用的有效性。直流爐中間點溫度是一個非常重要的參數,是燃水比是否恰當的依據。由于兩級噴水減溫的控制基本相同,因此本文只以一級噴水減溫為例來說明所設計的系統。
2 神經網絡PID控制器的Matlab數字仿真
2.1 系統辯識
在訓練參數給定的情況下,改變神經網絡隱層個數以及各層神經元個數,經訓練均可得到不同的網絡,但其擬合訓練數據的能力不同。依據各網絡的擬合性能指標,選取擬合效果最佳的具有兩個隱層的神經網絡,來代替實際的廣義被控對象。該網絡的兩隱層激活函數均采用Sigmoid型(S型)函數,輸出層采用purelin線性激活函數,各層的神經元個數分別為[3,3,10,1]。這樣所建立的神經網絡具有最好的控制效果。圖2-1-2給出了此網絡結構下基于trainbr訓練的誤差變化曲線。
訓練后期,SSE值基本保持不變,這說明該網絡已經接近收斂了。
2.2 PID參數優化
在由神經網絡將對象的特性和模型辨識出來以后,我們用單純形法對PID參數進行優化,目標函數采用改進后的綜合目標函數,得到的結果如圖2-2-1:(優化效果較好)
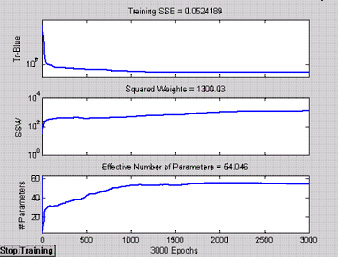
圖2-1-2 基于trainbr訓練的誤差變化曲線

圖2-2-1 單純形法優化結果
2.3 神經網絡與經典PID控制的對比
將該神經網絡控制器與經典的PID控制器作比較,用MATLAB對其進行仿真,仿真曲線如圖2-3-1,2-3-2,2-3-3所示。圖2-3-1,2-3-2,2-3-3中,曲線1為內、外回路的控制器均采用PID控制器的仿真曲線;曲線 2 為內回路控制器采用神經網絡控制器、外回路控制器采用PID控制器的仿真曲線。綜上所示,對于主汽溫系統,采用神經網絡辨識的自整定PID控制器的串級控制,其超調量較小,過渡時間小,穩態精度高,而對于系統參數變化具有較強的適應能力。
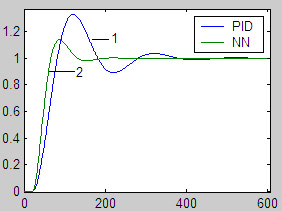
圖2-3-1 加階躍輸入(r=1)時的響應曲線
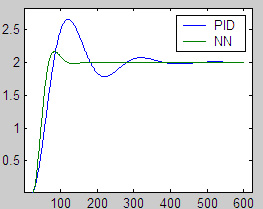
圖2-3-2 加階躍輸入(r=1)時的響應曲線

圖2-3-3 對象參數變化時的響應曲線
3 基于神經網絡辨識的PID溫度控制控制仿真實驗
3.1實物仿真實驗
通過仿真,可以得知神經網絡 PID 控制器的性能要優于常規 PID 控制器,為了進一步驗證這一點,本文采用了實驗模擬這一方法來進行檢驗。在實驗中采用了由電阻爐加熱的水溫控制系統來進行了模擬,實驗系統如圖3-1所示。針對神經網絡PID 控制器的控制效果以及抗擾動和魯棒性能,結合硬件和軟件的設計,實驗內容著眼點集中在:(1)不同控制周期對于溫度控制的影響;(2)神經網絡 PID 控制器的階躍響應;(3)神經網絡 PID 控制器的抗擾動以及對被控對象的魯棒性;(4)PID控制參數的在線整定。
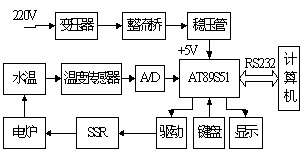
圖3-1 實驗系統設計圖
3.2 硬件設計
系統的主要硬件組成:
(1)電源部分利用變壓器將外界交流220V電壓變為7.5V,再利用整流橋將其整流為直流+5V電壓,供給單片機及系統使用。
(2)主芯片部分采用AT89S51芯片,它是一個有4 kBFlash可編程、可擦除只讀存儲器(E2PROM)的低壓、高性能8位單片機。
(3)溫度檢測采用DS18B20傳感器,DS18B20僅有3個引腳,采用1-wire技術,測量溫度范圍為 -55°C~+125°C,精度最高可達12位(0.0625度)。從DS18B20的數據引腳輸出的是直接已經轉化后的溫度數字信號,大大提高了系統的抗干擾性。
(4)鍵盤部分用三個按鍵實現操作,一個按鍵實現設定溫度與實際溫度的切換,另外兩個按鍵實現是定溫度時增加和減少設定值。上電后LED顯示當前溫度,按下切換鍵后即可進行溫度設定,再次按下切換鍵可返回到當前溫度顯示。
(5)顯示部分利用74HC164將一位輸入變為8位并行輸出并送到LED進行顯示.
(6)本系統利用MAX232芯片與上位機進行通信。
(7)輸出部分采用固態繼電器將單片機+5V輸出轉換位為20V交流輸出以控制電爐的通斷,從而達到控制水溫的目的。
3.3 軟件設計
這個實驗裝置以AT89S51為核心,AT89S51單片機模糊控制系統要完成數據采集、數據顯示、溫度控制及串行通信等功能。整個溫度控制系統程序可劃分為以下幾個部分,主程序、中斷子程序、數據采集濾波放大子程序,A/D轉換子程序、顯示子程序、讀取鍵盤子程序,報警子程序,RS232通信模塊等等。系統程序的編制采用了模塊化的結構,它們之間通過軟件接口連接。本系統的軟件采用C語言編寫,在WAVE6000版本的集成開發環境下進行編譯連接。由于神經網絡數據運算量巨大,所以我們將系統的神經網絡訓練和辨識以及PID參數尋優部分放在上位機上,由MATLAB完成計算之后經由MATLAB與C語言的接口將優化后的數據發送到下位機,由下位機來完成執行功能。
4 創新觀點
本文作者創新點:基于系統辨識及神經網絡的基本理論及PID參數整定方法及遺傳算法的基本原理及基本操作,提出基于遺傳算法尋優PID參數的構想。在對神經網絡辨識PID控制器在過熱蒸汽溫度控制上的仿真發現,神經網絡辨識PID控制器能夠滿足溫度控制要求,具有相當好的魯棒性。利用電阻爐水溫控制實驗來模擬過熱蒸汽的控制,通過分析實驗數據發現神經網絡 PID 控制要優于常規 PID 控制器,可以達到響應快、超調小、抗擾動和魯棒性好的要求。
參考文獻:
[1] 何一文,陳鐵軍,苗小冬.基于單元模型的神經網絡預測控制及其應用.微計算機信息, 2006年第8-2期,P290-292
[2]陳大禧,朱鐵光,大型回轉機械診斷現場實用技術,北京:機械工業出版社,2002
[3]何立民.單片機應用技術選編(5)[M].北京:北京航空航天大學出版社,1997
[4]周立功.ARM嵌入式系統基礎教程[M].北京:北京航空航天大學出版社,2005
[5]周立功.ARM嵌入式Linux系統構建與驅動開發范例[M].北京:北京航空航天大學出版社,2006