
摘 要:神經(jīng)網(wǎng)絡(luò)具有自學(xué)習(xí)、自調(diào)整、自適應(yīng)能力。本文介紹了由PLC控制實現(xiàn)的神經(jīng)網(wǎng)絡(luò)PID自適應(yīng)控制器。實驗表明,該技術(shù)對于提高控制精度是行之有效的。具有在調(diào)速系統(tǒng)中推廣應(yīng)用的價值。
關(guān)鍵詞:PLC;PID控制器;神經(jīng)網(wǎng)絡(luò);直流調(diào)速系統(tǒng)
一、引言
雖然目前的交、直流傳動系統(tǒng)都有較成熟的控制方案,采用線性PI或PID 調(diào)節(jié)器可以取得基本滿意的控制效果。但是,常參數(shù)的PID調(diào)節(jié)器只對線形系統(tǒng)有效,它們的控制性能因為系統(tǒng)的非線性而降低。在電力傳動系統(tǒng)中,雖可以建立電機模型,但是電機本身和負(fù)載的一些參數(shù)(如交流電機的轉(zhuǎn)子電阻、拖動負(fù)載的轉(zhuǎn)動慣量)是無法確定的、時變的。電氣設(shè)備的機械飽和特性,開關(guān)的失控時間、控制延時都是不能精確建模的非線性因素。 然而將模糊與神經(jīng)網(wǎng)絡(luò)技術(shù)引入電力傳動系統(tǒng)設(shè)計智能控制器卻可以很好地克服電力傳動對象變參數(shù)、非線性等問題,大大提高系統(tǒng)的魯棒性。引入模糊與神經(jīng)網(wǎng)絡(luò)技術(shù)的主要優(yōu)點是不需要過程的復(fù)雜模型,而且適應(yīng)性強,容易實現(xiàn)。
本文是將PID控制規(guī)律融進(jìn)神經(jīng)網(wǎng)絡(luò)[3]之中,實現(xiàn)神經(jīng)網(wǎng)絡(luò)與PID控制規(guī)律的本質(zhì)結(jié)合,共同完成PID自適應(yīng)調(diào)節(jié),并用PLC實現(xiàn)神經(jīng)網(wǎng)絡(luò)PID自適應(yīng)控制,確保電力傳動系統(tǒng)的控制精度和可靠性。
二、PID自適應(yīng)控制器
常規(guī)PID控制算法為:
(1) 
用求和代替積分,微分用有限差分代替,即上式為:
(2) 
式中T為采樣周期,KP是比例系數(shù),KI=KP/TI是積分比例系數(shù),KD=KPTD是微分比例系數(shù)。
根據(jù)上式,組成由兩層線性神經(jīng)網(wǎng)絡(luò)構(gòu)造的控制器,如圖1所示。它是由比例、積分、微分三個單元組成的一種動態(tài)前向網(wǎng)絡(luò),各層神經(jīng)元個數(shù)、連接方式、連接權(quán)值是按PID控制規(guī)律的基本原則和已有的經(jīng)驗確定,能夠保證系統(tǒng)的穩(wěn)定和快速收斂。
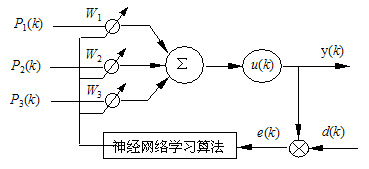
圖1神經(jīng)網(wǎng)絡(luò)PID自適應(yīng)控制器
其中r為系統(tǒng)給定值,y為系統(tǒng)輸出值,d為標(biāo)定值, Lr為學(xué)習(xí)步長:0
本文用PLC實現(xiàn)神經(jīng)網(wǎng)絡(luò)PID自適應(yīng)控制,并應(yīng)用于直流邏輯無環(huán)流可逆調(diào)速控制系統(tǒng),使系統(tǒng)的控制精度達(dá)到了只有理論上才能實現(xiàn)的無靜差。考慮到可逆調(diào)速控制系統(tǒng)的控制設(shè)備、器件數(shù)量多、對系統(tǒng)運行安全可靠提出的更高要求,采用高可靠性的PLC作為控制核心,以晶閘管為執(zhí)行機構(gòu)的直流調(diào)速控制系統(tǒng),其系統(tǒng)主要由兩部分構(gòu)成,系統(tǒng)框圖如圖2所示。其中PLC實現(xiàn)神經(jīng)網(wǎng)絡(luò)PID自適應(yīng)器與邏輯無環(huán)流雙閉環(huán)的控制部分,長劃線-點-點虛線框內(nèi)為(V—M)三相橋式晶閘管—電動機系統(tǒng),GT為V—M系統(tǒng)的晶閘管觸發(fā)電路,它由硬件實現(xiàn)。短劃線虛線框內(nèi)為換向軟開關(guān),由PLC軟件實現(xiàn)。
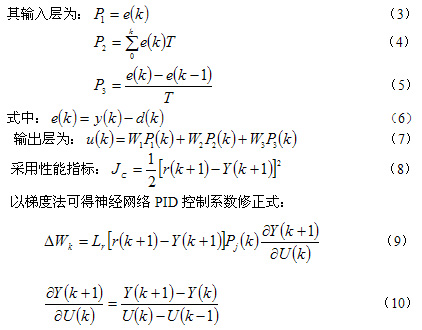
圖2系統(tǒng)組成框圖
該系統(tǒng)為速度、電流雙閉環(huán)調(diào)速系統(tǒng),也就是說PLC對這三個模擬輸入信號分別進(jìn)行速度調(diào)節(jié)器和電流調(diào)節(jié)器相串聯(lián)的兩級PID運算,向晶閘管的觸發(fā)電路給出移相電壓信號。所以,系統(tǒng)跟隨的快速性及控制精度關(guān)鍵取決于PID調(diào)節(jié)器的設(shè)計和調(diào)節(jié)精度。本系統(tǒng)采用單神經(jīng)元組成的PID自適應(yīng)控制器,它即具有傳統(tǒng)PID控制器的優(yōu)點,又具有神經(jīng)網(wǎng)絡(luò)的并行結(jié)構(gòu)和學(xué)習(xí)記憶功能,并且結(jié)構(gòu)簡單,易于實現(xiàn),所以它更適合于控制系統(tǒng)。
四、基于PLC的自適應(yīng)控制方法
作為現(xiàn)代工業(yè)三大支柱(機器人、CAD/CAM、PLC)之一的PLC具有可靠性高、抗干擾能力強、操作靈活簡單、接線簡潔、性價比高等優(yōu)點,特別是易于擴展、編程簡單、耐惡劣環(huán)境能力強等特點,已迅速占領(lǐng)了工業(yè)生產(chǎn)自動化領(lǐng)域,成為工業(yè)自動化領(lǐng)域的強有力工具。
在PLC中實現(xiàn)神經(jīng)網(wǎng)絡(luò)PID自適應(yīng)控制,即可減少分接頭數(shù),提高PID調(diào)節(jié)的快速性和控制精度,又可以保證動作的可靠性,提高系統(tǒng)運行的安全性。
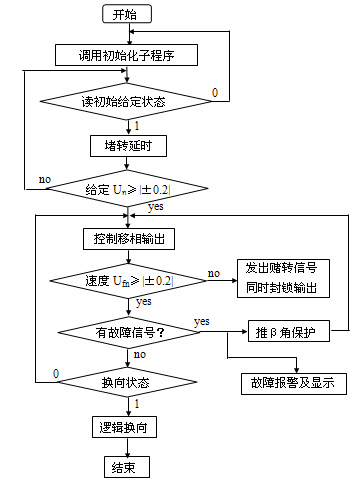
在直流雙閉環(huán)調(diào)速系統(tǒng)中,為了提高系統(tǒng)響應(yīng)的快速性和限流的必要性,電流內(nèi)環(huán)仍然采用傳統(tǒng)的PI調(diào)節(jié)器,而轉(zhuǎn)速環(huán)則采用神經(jīng)網(wǎng)絡(luò)PID自適應(yīng)控制器,以提高系統(tǒng)的魯棒性。這兩級相串聯(lián)的PID運算都由PLC實現(xiàn),我們把這一運算環(huán)節(jié)作為中斷程序來處理。PLC的PID自適應(yīng)控制中斷處理子程序流程圖如圖3所示。
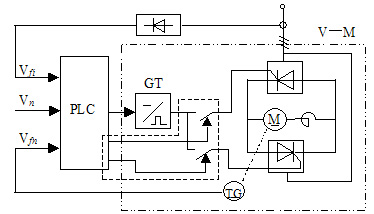
圖3中斷處理子程序流程圖
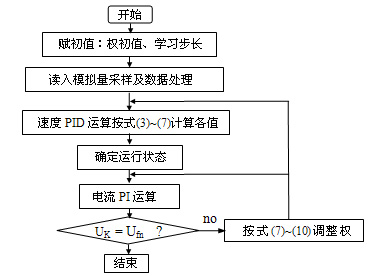
圖4主程序流程圖
我們選用西門子公司S7-200系列的PLC進(jìn)行系統(tǒng)配置[5]。根據(jù)邏輯無環(huán)流可逆直流調(diào)速系統(tǒng)實際運行的要求,PLC主要實現(xiàn)了兩級串聯(lián)PID自適應(yīng)調(diào)節(jié)及邏輯換向原則。同時,還實現(xiàn)了系統(tǒng)保護(hù)功能和系統(tǒng)顯示功能。
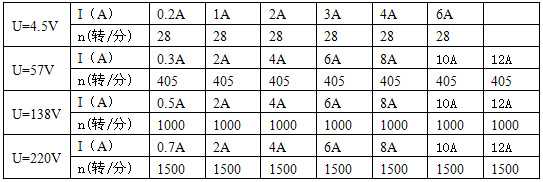
針對該直流調(diào)速系統(tǒng)的控制功能,我們在實驗室進(jìn)行了帶負(fù)載實際運行實驗,實驗直流電動機的額定參數(shù)為U =220V I = 12A n =1500轉(zhuǎn)/分,實驗線路示意圖如圖2所示。實測的機械特性數(shù)據(jù)如下表所示:
測試結(jié)果證實,其靜特性能夠達(dá)到只有理論上的無靜差,靜差率S = 0。
其它技術(shù)性能指標(biāo)也均達(dá)到了設(shè)計要求。
五、結(jié)束語
用PLC實現(xiàn)的神經(jīng)網(wǎng)絡(luò)PID自適應(yīng)控制器應(yīng)用于傳動調(diào)速系統(tǒng),控制精度高, 而且經(jīng)濟可靠、抗干擾能力強,在允許負(fù)載、電樞電阻和轉(zhuǎn)動慣量變化的范圍內(nèi),都能保持響應(yīng)的快速性以及無靜差、無超調(diào)的優(yōu)良性能。它特別適用于機床控制系統(tǒng),它即可以實現(xiàn)調(diào)速部分,同時也可利用PLC順序控制的應(yīng)用特點,替代其余的繼電器控制部分,這樣可使系統(tǒng)結(jié)構(gòu)緊湊,便于維護(hù)。
參考文獻(xiàn)
[1] 陳宇編. 可編程序控制器基礎(chǔ)及編程技巧[M]. 上海:華南理工大學(xué)出版社,1999
[2] S7—200可編程序控制器系統(tǒng)手冊[Z]. SIMATIC, 1998.
[3] 侯遠(yuǎn)龍. 電氣傳動系統(tǒng)PID自適應(yīng)控制研究[J]. 工業(yè)儀表與自動化裝置,2001,2
[4] 曹承志編. 微型計算機控制新技術(shù)[M]. 北京:機械工業(yè)出版社,2001.
[5] 陳均. 基于S7—200的潛水泵站自動控制技術(shù) [J]. 微計算機信息。2006. 9:140—142.
[6] 陶永華等. 新型PID控制及其應(yīng)用[M]. 北京:機械工業(yè)出版社,1998,9.