
引言
在未知環(huán)境中,路況具有復(fù)雜性及未知性特點(diǎn)。移動機(jī)器人準(zhǔn)確的路況探測及其自身的平穩(wěn)運(yùn)行,對機(jī)載設(shè)備與探測任務(wù)本身都非常重要。目前,對移動機(jī)器人運(yùn)動控制研究多集中在前向通道的算法研究,有關(guān)狀態(tài)信息檢測、傳輸反饋環(huán)節(jié)的研究相對較少。
雙軸微機(jī)械陀螺儀傳感器可以測量機(jī)器人的俯仰與翻轉(zhuǎn),但微機(jī)械陀螺儀有隨機(jī)漂移性,無法直接應(yīng)用,需要對輸出值作算法處理。參考文獻(xiàn)中的微機(jī)械陀螺儀隨機(jī)漂移的算法,可以在一定程度上解決漂移方面的問題,但仍有改進(jìn)的空間,濾波性能有待進(jìn)一步優(yōu)化提高。在現(xiàn)有自適應(yīng)UKF算法的基礎(chǔ)上,改變比例對稱采樣策略的相關(guān)參數(shù)可達(dá)到較好的濾波效果。現(xiàn)有的以ATmegal6為微處理器的CAN總線程序還有一些不完備之處,本文采用PeliCAN模式加入了完備的錯(cuò)誤分析程序,并支持系統(tǒng)自身測試功能。
1 系統(tǒng)硬件設(shè)計(jì)
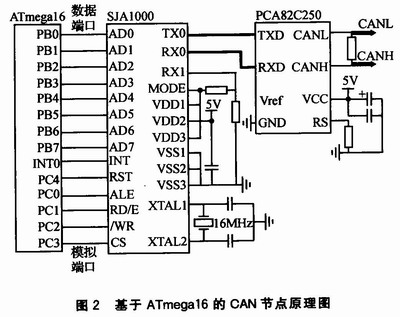
移動機(jī)器人運(yùn)動檢測系統(tǒng)原理如圖1所示。采用InvenSense公司生產(chǎn)的IDG300型雙軸微機(jī)械陀螺儀進(jìn)行移動機(jī)器人運(yùn)動過程的俯仰與翻轉(zhuǎn)角度檢測;A/D采樣電路的主芯片為8位A/D轉(zhuǎn)換器ADC0809。采集的數(shù)據(jù)經(jīng)改進(jìn)的自適應(yīng)UKF算法濾波后,經(jīng)CAN節(jié)點(diǎn)向運(yùn)動控制平臺傳輸機(jī)器人的運(yùn)動狀態(tài)數(shù)據(jù)。以ATmegal6為微處理器,SJAl000為CAN協(xié)議控制器,PCA82C250為CAN收發(fā)器的CAN節(jié)點(diǎn)原理如圖2所示。

2 系統(tǒng)軟件設(shè)計(jì)
2.1 改進(jìn)自適應(yīng)UKF濾波算法
改進(jìn)的自適應(yīng)UKF算法如圖3所示。
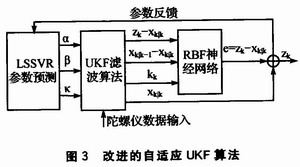
經(jīng)典UKF濾波算法采用某種策略得到狀態(tài)估計(jì)sigma點(diǎn)集后,大致分兩個(gè)步驟預(yù)測與更新,具體方程見參考文獻(xiàn)。不同的采樣策略會影響sigma點(diǎn)采樣及sigma點(diǎn)個(gè)數(shù)計(jì)算。比例對稱采樣方法中具體的sigma點(diǎn)采樣方法為:
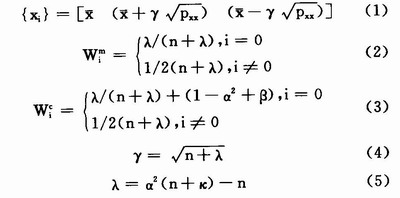
式(1)~式(5)中需要確定3個(gè)參數(shù)α、β和κ。有一定的經(jīng)驗(yàn)值,但是微機(jī)械陀螺儀不同時(shí)間測量輸出差別較大,固定的值不能滿足角度測量的需要。在陀螺儀輸出值有明顯差別時(shí),需要采用最小二乘支持向量回歸機(jī)(LSSVR)對α、β和κ值進(jìn)行回歸,支持向量機(jī)對小樣本的支持,因此可以做出下一步較準(zhǔn)確的預(yù)測。結(jié)合參考文獻(xiàn)中的算法原理,算法步驟如下:
①輸入狀態(tài)初始條件![]() 的值(
的值(![]() ;β=2,κ=O或3-n,n取1~3)。
;β=2,κ=O或3-n,n取1~3)。
②卡爾曼濾波估計(jì)的參數(shù)輸入RBF神經(jīng)網(wǎng)絡(luò),利用神經(jīng)網(wǎng)絡(luò)的自適應(yīng)能力和函數(shù)逼近能力對這些特征量進(jìn)行訓(xùn)練調(diào)整。
③更新方程。若輸出角度輸出較準(zhǔn)確,則數(shù)據(jù)發(fā)往CAN總線,程序轉(zhuǎn)至第②步。
④若輸出角度有偏差,則LSSVR算法調(diào)整參數(shù)α、β、κ的值,程序轉(zhuǎn)至第②步。
2.2 CAN節(jié)點(diǎn)程序設(shè)計(jì)
以ATmegal6作CAN節(jié)點(diǎn)的微處理器需要解決端口(ALE,RD/E,/WR)的模擬問題。CAN節(jié)點(diǎn)部分主從機(jī),節(jié)點(diǎn)ID地址決定是否接收任務(wù)以及發(fā)送的順序;幀格式采用數(shù)據(jù)幀;幀類型采用擴(kuò)展幀;PB0~PB7作地址數(shù)據(jù)總線;PC3輸出片選信號;PC4控制SJAl000的復(fù)位引腳;INT0(PD2)控制終端信號。錯(cuò)誤檢測分析程序包括:仲裁丟失捕捉(ALE)、錯(cuò)誤代碼捕捉(ECC)、錯(cuò)誤警告限制(EWLR)、RX錯(cuò)誤計(jì)數(shù)(RXERR)、TX錯(cuò)誤計(jì)數(shù)(TXERR)寄存器配置。
程序流程如下:
①SJAl000寄存器地址配置;
②CAN初始化、進(jìn)入復(fù)位狀態(tài)配置時(shí)鐘分頻、代碼驗(yàn)收、驗(yàn)收屏蔽寄存器。
③等待總線數(shù)據(jù),判別報(bào)文是否有效:若有效,進(jìn)入收發(fā)函數(shù),發(fā)送完畢轉(zhuǎn)至第③步;若報(bào)文無效,則進(jìn)行錯(cuò)誤處理,程序轉(zhuǎn)至下一步;
④錯(cuò)誤分析,丟掉錯(cuò)誤報(bào)文。程序轉(zhuǎn)至第③步。
3 實(shí)驗(yàn)分析
3.1 數(shù)據(jù)來源
實(shí)驗(yàn)條件:陀螺儀測試系統(tǒng)一套(包括360個(gè)脈沖/圈的編碼器、IDG-300軟硬件系統(tǒng)),使用Matlab仿真平臺。測試系統(tǒng)可以在±50°擺動運(yùn)動,陀螺儀的偏轉(zhuǎn)角度通過編碼器輸出,精度為1°。
3.2 陀螺儀數(shù)據(jù)處理
所有數(shù)據(jù)通過測試系統(tǒng)實(shí)驗(yàn)獲得。篇幅有限,下面給出X軸輸出數(shù)據(jù)采用改進(jìn)自適應(yīng)UKF算法后的濾波效果,如圖4~圖6所示。從圖中可以看出,該方法明顯縮成了數(shù)據(jù)波動范圍。

3.3 CAN總線數(shù)據(jù)傳輸
對CAN總線數(shù)據(jù)傳輸穩(wěn)定性做了相應(yīng)實(shí)驗(yàn)。取數(shù)量相同的數(shù)據(jù),分別通過總線和串口進(jìn)行傳輸,信號線長度都是2 m,分別進(jìn)行相同數(shù)據(jù)量的1 h和24 h數(shù)據(jù)傳輸實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果如表1所列。

CAN總線通信方式是指在兩個(gè)節(jié)點(diǎn)間通信;串口通信是指使用ATmegal6芯片的RXD、TXD引腳功能進(jìn)行數(shù)據(jù)傳輸。正確率的計(jì)算方法為:通信正確率=正確接收數(shù)量個(gè)數(shù)/發(fā)送數(shù)據(jù)總個(gè)數(shù)。
結(jié)語
通過改進(jìn)自適應(yīng)UKF濾波算法處理新型雙軸微機(jī)械陀螺儀數(shù)據(jù),使微機(jī)械陀螺儀輸出數(shù)據(jù)相對穩(wěn)定,一定程度上降低了微機(jī)械陀螺儀隨機(jī)漂移。數(shù)據(jù)傳輸采用CAN總線通信的方式,提高了數(shù)據(jù)傳輸?shù)恼_率與穩(wěn)定性。
但該系統(tǒng)尚不完善,特別是處理微陀螺儀隨機(jī)漂移問題的方法有待進(jìn)一步改進(jìn),以提高微機(jī)械陀螺儀的精度,使機(jī)器人運(yùn)動檢測更精確。