
引言
隨著微處理器技術的發展,微處理器不斷升級,內核的處理速度越來越快,同時也出現了精確延時的問題。由于ARM7微控制器LPC21xx使用了三級流水線技術,精確延時對開發者特別是初學者帶來了一定的難度。下面介紹幾種LPC21xx在C程序下實現精確延時的實用方法。
實現延時通常有兩種方法:一種是硬件延時,采用定時器/計數器實現精確延時,可以提高CPU的工作效率;另一種是軟件延時,這種方法主要采用循環體進行。
1 硬件延時
Philips公司的LPC21xx系列微控制器具有2個32位可編程定時器/計數器,均具有4路捕獲、4路比較并輸出電路。定時器對外設時鐘周期進行計數,在到達指定的定時值時可選擇產生中斷來執行其他動作。可用作對內部事件進行計數的間隔定時器,或自由運行的定時器,亦
可通過捕獲輸入實現脈寬調制。LPC21xx系列具有4個32位匹配寄存器。匹配時,可選擇產生中斷使定時器繼續工作、停止或復位。
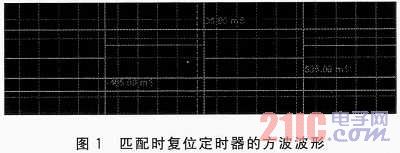
使PO.7口輸出方波的波形。匹配時復位定時器,產生中斷使高低電平持續時間均為O.5 s,如圖1所示。
在實際應用中,定時常采用中斷方式,如進行適當的循環可實現幾秒甚至更長時間的延時。從程序的執行效率和穩定性兩方面考慮,使用定時器/計數器延時是最佳的方案。但是占用了一個定時器,比較浪費,并且可移植性也比較差。因此,在并非要求精確定時的情況下,一般不建議采用。
2 軟件延時
2.1 使用系統函數延時
LPC21xx微控制器可以采用嵌入式操作系統進行任務的管理,如果需要延時可以使用系統的延時函數實現。采用μC/0S-II實時操作系統時,可以使用系統提供的延時函數。
(1)任務延時函數OSTimeDly()。延時長短由指定的時鐘節拍數目(O~65535)來確定。調用該函數會使系統進行一次任務調度,去執行下一個優先級最高的任務。任務調用該函數后,一旦規定的時間到了,或有其他任務通過調用OSTimeDlyResume()取消了延時,那么該任務就會立即進入就緒狀態。
(2)按時分秒延時函數OSTimeDlyHMSM()。為了更為習慣地使用任務,系統還提供了按時分秒延時函數。此函數可以精確延時到小時、分、秒,調用這個函數可引發一次任務調度。調用函數OSTimeDlyResume()可取消延時,該任務就會立即進入就緒狀態。
例如,通過P1.18口控制LEDl,調用OSTimeDlyHMSM()函數進行1 s的延時。代碼如下:
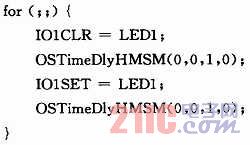
示波器觀察到的波形以及延時情況如圖2所示。
2.2 使用示波器確定延時時間
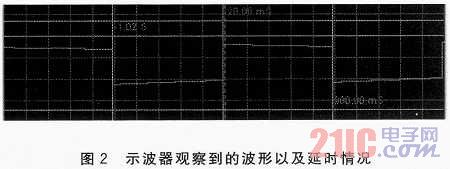
LPC21xx系列微控制器基于ARM7TDMI-S內核,采用三級流水線結構,如圖3所示。處理和存儲系統的所有部分都可連續工作。通常在執行一條指令的同時就對下一條指令進行譯碼,并將第三條指令從存儲器中取出。
因帶有Cache,所以具體指令執行時間會有不同,在學習和開發過程中需要對指令時間有較粗略的判斷,具體到μs級、ms級的延時。雖然采用定時器似乎比較精確,但是定時器不能解決所有問題,有些情況還需要用到軟件延時。代碼如下:
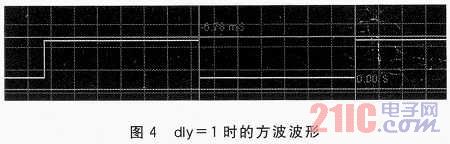
使PO.7口輸出方波,高低電平延時時間為dly=1。通過示波器觀察延時時間,具體波形如圖4所示。

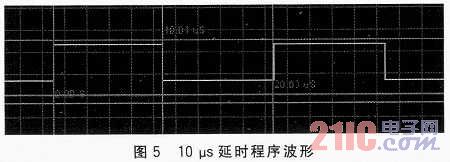
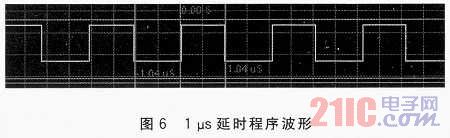
10 μs和1μs延時程序的波形分別如圖5和圖6所示。在主函數里調用以上函數,就可以實現非精確延時。采用這種方法,雖然延時不是十分精確,但是不占用資源,并且可移植性很好,示波器效果觀察起來直觀。因此,在不要求延時很精確的情況下,可以采用此方法進行定時。
2.3 使用反匯編工具計算延時時間
對于不熟悉示波器但熟悉匯編語言,并且了解指令周期的開發人員來說,可以用ADSl.2中AXD Debugger的反匯編工具計算延時時間。在反匯編窗口中可用源程序和匯編程序的混合代碼或匯編代碼顯示目標應用程序,再根據每條指令周期計算出結果。例如:
其反匯編結果如圖7所示。
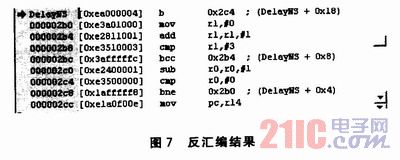
這種方法最直觀,但是要求開發人員熟練掌握匯編語言及指令周期,并且理解流水線及Cache的工作原理等,需要花費大量的精力,而且指令周期只對低端單片機有用。因此,對于初學者這種方法不可取。
結語
掌握延時程序的編寫,能夠使程序準確得以執行,這對學習和項目開發有著重要的意義。本文介紹了LPC21xx系列微控制器的幾種計算延時程序執行時間并實現精確延時的方法。使用定時器進行延時是最佳的選擇,可以提高CPU工作效率。在使用系統管理任務時,可以選擇使用系統延時函數;在不使用嵌入式系統,無法使用定時器而又需要實現比較精確的延時時,其他幾種方法可以實現不等時間的延時。
寫延時程序是一項很麻煩的任務,可能需要多次修改才能滿足要求,以上介紹只是提供了一些精確延時的方法,在使用時需視情況而定。