
1引言
所謂飛輪儲能(Flywheel Energy Storage , FES)技術,就是利用高速旋轉的飛輪將能量以動能的形式儲存起來,當能量緊急缺乏或需要時,飛輪減速運行,將儲存的能量釋放出米。飛輪儲能技術以其高效率、長壽命、維持簡單、無污染且高效、節(jié)能等優(yōu)點,日益受到人們的關注,成為國際能源界研究的熱點之一。同時飛輪儲能技術應用于航天領域也成為人們追求的目標[1]。
不平衡轉動力矩作用是飛輪轉速改變的根本原因,當轉矩的方向與飛輪轉動方向一致時,飛輪受到正向不平衡轉矩的作用而加速,能量轉化為動能儲存起來;相反,飛輪減速,動能轉化為其它形式的能量。在轉化過程中可以吸收和釋放的能量為:
飛輪儲能系統(tǒng)包括儲存能量的飛輪轉子系統(tǒng)、支撐轉子的軸承系統(tǒng)、進行能量轉化和拖動的電動/發(fā)電機系統(tǒng)、控制系統(tǒng)。飛輪的姿控、儲能兩種功能都是由電機系統(tǒng)完成的。在飛輪儲存能量狀態(tài)下,電機處于電動狀態(tài),給飛輪轉子提供力矩;在飛輪釋放能量狀態(tài)下,電機處于發(fā)電狀態(tài),向蓄電池等提供能量[2]。這就要求飛輪用電機系統(tǒng)既要有電動功能,又要有發(fā)電功能。本方案是集這兩種功能為一體的設計。
控制領域高速DSP的出現(xiàn),使得無直流電機數(shù)字控制系統(tǒng)不僅能獲得較高的控制性能,更具有方便靈活的特點。本文介紹方案以DSP為控制核心,
2系統(tǒng)硬件結構
2.1 DSP的選用
DSP芯片,也稱數(shù)字信號處理器,是一種具有特殊結構的微處理器[3]。無刷直流電機數(shù)字控制系統(tǒng)的核心為TI公司的DSP芯片TMS320LF2407A,它是TI公司推出的專門用于電機控制DSP芯片,其為定點DSP,具有極高的運算速度,主頻可達40MHz,運算能力可達40MIPS,可以用來快速地實現(xiàn)各種數(shù)字信號處理算法。指令系統(tǒng)還支持程序存儲器和數(shù)據存儲器之間的數(shù)據傳輸,從而可以將算法中可能用到的表或系數(shù)直接放在程序存儲空間內,不用另外配置ROM芯片[3]。
2.2功率驅動電路結構
儲能飛輪要求電機在不同時刻工作在兩種狀態(tài),只要在功率電路上增加兩個控制電子開關即可實現(xiàn)電動和發(fā)電狀態(tài)的切換。具體電路如圖1。
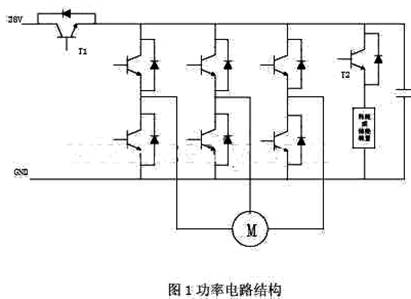
當T1導通、T2關斷時,三相橋工作在逆變模式,電流由28V直流逆變成三相交流提供給電機,電機處于電動狀態(tài)。
當T2導通、T1關斷時,三相橋工作在整流模式,電機處于發(fā)電狀態(tài),電流通過三相橋整流為直流電,提供給耗能或儲能裝置(功率電阻或升降壓變換器)。
2.3系統(tǒng)整體方案
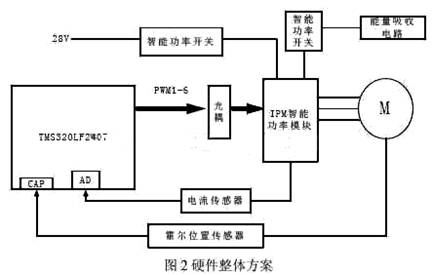
選用TMS320LF2407A作核心處理器,通過DSP事件管理器的PWM模塊輸出脈寬調制波形,經過光電耦合電路,到達智能功率模塊IPM的邏輯控制端。IPM的輸出端接電機三相。電流傳感器和霍爾位置傳感器分別將電流和轉速信號回饋給DSP的CAP單元和AD單元,在IPM和供電電壓28V和能耗功率電阻之間分別是一個智能功率開關,控制切換IPM狀態(tài)。具體框圖如圖2。
3軟件設計
3.1速度檢測
電機的速度檢測方式主要有三種:速度反饋的具體算法對于離散系統(tǒng)的性能有很大影響,目前的速度檢測算法通常有M法、T法、M/T 法,其中M法適合高速,T法適合低速,M/T法在的適用范圍較大。本系統(tǒng)在速度計算上,由于采用的是霍爾反饋,電機每轉一圈只產生3個脈沖,即使在30000rpm下,轉頻為1500Hz,也要0.67ms產生一個脈沖,產生脈沖周期較長,故本方案采用T法進行計算。比較捕捉時間間隔平均值timer_diff和定時器周期T2pr的大小以判斷比例輸出的符號:如果timer_diff>T2pr,則說明實際轉速較要求轉速低,此時應加速,也即比例輸出為正;如果timer_diff
LACC #4Ch,15
ADD #25A0h ;1/T2pr
RPT #15
SUBC TIME_DIFF ;除以時間間隔,得到轉頻
3.2PWM的產生
首先是對PWM模塊的進行初始化。配置PWM模塊各寄存器,選擇Timer1作為其時間基礎,發(fā)生6kHz的PWM方波。
利用變量DUTY調整PWM輸出脈沖的占空比。由于PWM實際上就是比較輸出,因此,只要改變相關的比較輸出寄存器,既可改變PWM的占空比。該函數(shù)中,DUTY為占空比,將DUTY和Timer1的計數(shù)周期值T1pr相乘,即可得所需的比較寄存器值。其它函數(shù)改變DUTY之后再調用該函數(shù),即可改變PWM輸出的占空比。
3.3調節(jié)算法實現(xiàn)
在實際的電機穩(wěn)速系統(tǒng)中使用的調節(jié)算法是多樣的,模糊控制、比例積分控制、鎖相環(huán)控制等,本系統(tǒng)中選用傳統(tǒng)的PI控制方式。在基于DSP的數(shù)字控制系統(tǒng)中,將模擬系統(tǒng)中使用的連續(xù)調節(jié)函數(shù)離散化,同時為了防止由于誤差的累加,調節(jié)輸出大幅度變化,這種情況是實際系統(tǒng)中所不允許的,故選用增量式PID調節(jié),具體數(shù)學表達式為:
![]()
PID子程序算法具體實現(xiàn)如下:
SPLK #0,MID_RESULT ;初始化中間變量
LDP #E_NOW
LACC E_NOW ;讀取當前速度誤差
SUB E_LAST
LDP #MID_RESULT
SACL MID_RESULT ; e[KT]-e[KT-T]
LT MID_RESULT
MPY K_P ;Kp*{e[KT]-e[KT-T]}
SPL MID_RESULT
; --------------------------------------------------------
LDP #E_NOW
LT E_NOW
MPY K_I ;Ki*e[KT]
SPL DELTA
;----------------------------------------------------------
LACC MID_RESULT
ADD DELTA
LDP #DUTY
; ADD DUTY
SACL DUTY ;輸出占空比
實驗結果
系統(tǒng)實驗對象為磁懸浮飛輪用直流無刷電機,轉子組件重2.21kg,額定電壓28V,極對數(shù)3,Ke=0.00157,GD2=0.004819kgm2,R=0.135 ,KT=0.015,kp=0.65,ki=0.96,在高速30000rpm時,穩(wěn)速精度達0.02%。