
基于ALOHA 算法的 RFID 防碰撞技術(shù)研究
慧聰網(wǎng)
摘要: 1射頻識別系統(tǒng)介紹射頻識別技術(shù)(RadioFrequencyIdentification,RFID)是一種非接觸式自動識別技...
Abstract:
Key words :
1 射頻識別系統(tǒng)介紹
射頻識別技術(shù)(Radio Frequency Identification,RFID)是一種非接觸式自動識別技術(shù),與傳統(tǒng)的識別方式相比,它無需直接接觸、無需光學(xué)可視、無需人工干預(yù)即可完成信息輸入和處理,具有操作方便快捷、存儲數(shù)據(jù)量大、保密性好、反應(yīng)時間短、對環(huán)境適應(yīng)性強(qiáng)等優(yōu)點,現(xiàn)在已廣泛應(yīng)用于工業(yè)自動化、商業(yè)自動化和交通運(yùn)輸管理等領(lǐng)域,成為當(dāng)前IT業(yè)研究的熱點技術(shù)之一。
典型的RFID系統(tǒng)主要包括三個部分:電子標(biāo)簽(tag)、讀寫器(Read)和應(yīng)用系統(tǒng)(如圖1)。電子標(biāo)簽放置在被識別的對象上,是RFID系統(tǒng)真正的數(shù)據(jù)載體。通常電子標(biāo)簽處于休眠狀態(tài),一旦進(jìn)入讀寫器作用范圍內(nèi)就會被激活,并與讀寫器進(jìn)行無線射頻方式的非接觸式雙向數(shù)據(jù)通信,以達(dá)到識別并交換數(shù)據(jù)的目的。此外,許多讀寫器還都有附加的通信接口,以便將所獲的數(shù)據(jù)傳給應(yīng)用系統(tǒng)進(jìn)行進(jìn)一步的處理。

RFID系統(tǒng)工作時,當(dāng)有2個或2個以上的電子標(biāo)簽同時在同一個讀寫器的作用范圍內(nèi)向讀寫器發(fā)送數(shù)據(jù)的時候,就會出現(xiàn)信號的干擾,這個干擾就稱為碰撞,其結(jié)果將會導(dǎo)致該次傳輸?shù)氖。驗楸仨毑捎眠m當(dāng)?shù)募夹g(shù)防止碰撞的產(chǎn)生。
3 ALOHA算法及仿真結(jié)果
目前有多種防碰撞算法,主要分為ALOHA算法和樹形分解算法。由于樹形分解法有時會使某些標(biāo)簽的識別延遲可能比較長,所以ALOHA算法因具有簡單易實現(xiàn)等優(yōu)點而成為應(yīng)用最廣的算法之一。ALOHA算法是在ALOHA思想的基礎(chǔ)上,根據(jù)RFID系統(tǒng)的特點和技術(shù)要求不斷改進(jìn)形成的算法體系。它的本質(zhì)是分離標(biāo)簽的應(yīng)答時間,使標(biāo)簽在不同的時隙內(nèi)發(fā)送應(yīng)答。一旦發(fā)生碰撞,一般采取退避原則,等待下一循環(huán)周期發(fā)送應(yīng)答。ALOHA算法又分為幀時隙ALOHA算法、動態(tài)幀時隙ALOHA算法和分組幀時隙ALOHA算法等。
3.1 幀時隙ALOHA算法
幀時隙ALOHA(Framed slotted Aloha,F(xiàn)SA)算法是基于通信領(lǐng)域的ALOHA協(xié)議提出的。在FSA中,"幀"(Frame)是由讀寫器定義的一段時間長度,其中包含若干時隙。標(biāo)簽在每個幀內(nèi)隨機(jī)選擇一個時隙發(fā)送數(shù)據(jù)。所有標(biāo)簽應(yīng)答同步,即只能在時隙(Slot)開始點向讀寫器發(fā)送信息,每個標(biāo)簽發(fā)送的時隙是隨機(jī)選擇的。時隙可以分為三類:空閑時隙、應(yīng)答時隙和碰撞時隙。在空閑時隙中沒有識別任何標(biāo)簽,應(yīng)答時隙中可以正確識別一個標(biāo)簽。當(dāng)一個時隙中有多個標(biāo)簽同時發(fā)送應(yīng)答時就會產(chǎn)生碰撞,形成碰撞時隙。碰撞的標(biāo)簽退出當(dāng)前循環(huán),等待參與新的幀循環(huán)。
讀寫器當(dāng)前使用幀的長度為N,標(biāo)簽數(shù)為n,在一個時隙中存在r個標(biāo)簽的概率為:

當(dāng)r=1時,表示一個時隙只有一個標(biāo)簽,即成功讀取的時隙。因此,在一個閱讀周期中讀取標(biāo)簽數(shù)的期望值為:

系統(tǒng)效率為PN:
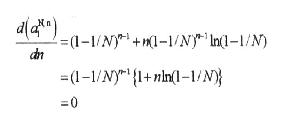
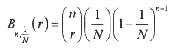
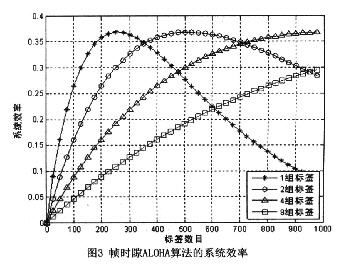
圖2示出了當(dāng)幀的長度為256時的系統(tǒng)效率。當(dāng)我們要想獲得最大效率時,使得:

因此,當(dāng)標(biāo)簽數(shù)量與幀時隙數(shù)相同時,讀寫器的識讀效率最高。標(biāo)簽數(shù)量與幀時隙數(shù)不匹配時,識讀效率會大大下降。如標(biāo)簽數(shù)遠(yuǎn)小于幀時隙數(shù),會造成大量的空閑時隙數(shù);而當(dāng)標(biāo)簽數(shù)量遠(yuǎn)高于幀時隙數(shù)時,則會產(chǎn)生過多的碰撞時隙;這兩種情況都會導(dǎo)致識別效率的降低。
3.2 動態(tài)幀時隙ALOHA算法
為使系統(tǒng)效率最優(yōu),提出動態(tài)幀時隙ALOHA(DynamicFramed Slotted Aloha,DFSA)算法,使得幀時隙數(shù)等于參與循環(huán)的標(biāo)簽數(shù)。DFSA每幀時隙數(shù)可以根據(jù)標(biāo)簽數(shù)的變化及時調(diào)整,使得標(biāo)簽數(shù)量與幀時隙數(shù)匹配。在開始新一個幀循環(huán)時,讀寫器要對參與幀循環(huán)的標(biāo)簽數(shù)進(jìn)行估計,這個過程在整個算法中發(fā)揮著重要的作用。如果所估計的標(biāo)簽數(shù)與實際情況相差甚遠(yuǎn),那么算法的效率就會發(fā)生大幅的下降,這樣就影響了系統(tǒng)的穩(wěn)定性。
目前,主要有兩種估計標(biāo)簽數(shù)的方法。第一種方法是在發(fā)生沖突時,一個時隙中至少有兩個標(biāo)簽發(fā)生碰撞。標(biāo)簽的估計函數(shù)為:

另一種方法是基于時隙二項分布來估計標(biāo)簽數(shù)。假設(shè)N代表當(dāng)前幀的長度,n表示標(biāo)簽數(shù)。標(biāo)簽選擇各個時隙數(shù)是等概率的,同一個時隙內(nèi)出現(xiàn)r個標(biāo)簽的概率,根據(jù)二項分布原理,得:
利用切比雪夫不等式估計標(biāo)簽數(shù)目。

3.3 分組幀時隙ALOHA算法
在RFID系統(tǒng)中,我們經(jīng)常使用動態(tài)幀時隙ALOHA算
法。但是由于最大幀時隙數(shù)有限制。當(dāng)標(biāo)簽數(shù)量過大時,我們不能無限制地增加幀的時隙數(shù)。因此提出了分組幀時隙ALOHA(Group Framed Slotted Aloha,GFSA)算法。分組的目的是要限制標(biāo)簽的應(yīng)答數(shù)量,使得參與識別循環(huán)的標(biāo)簽與幀的時隙數(shù)匹配。在GFSA算法中,如果估計出待識別的標(biāo)簽數(shù)超過了最大幀時隙數(shù)所能匹配的范圍時,保證每一組的待識別標(biāo)簽與最大幀時隙數(shù)相匹配。

由上式我們可以得到n=354。如果未識別標(biāo)簽數(shù)大于354時,為達(dá)到最佳系統(tǒng)效率,我們將標(biāo)簽分成兩組。我們提出的分組算法是基于最大幀時隙數(shù)為256的動態(tài)幀時隙ALOHA算法。在算法中,首先定義:
(1)為達(dá)到最大系統(tǒng)效率,通過獲取最后一個閱讀幀的結(jié)果(0或是1)來決定對分組標(biāo)簽進(jìn)行響應(yīng),以確定新循環(huán)幀的大小。
(2)為減小RFID系統(tǒng)的復(fù)雜性,通過使用n=c1+2ck估計函數(shù)來確定標(biāo)簽數(shù)量。
(3)利用上面推導(dǎo)出的n=354,作為分組的條件。當(dāng)系統(tǒng)內(nèi)標(biāo)簽數(shù)量比較小時,則使用最大幀時隙數(shù)為256的動態(tài)幀時隙ALOHA算法。一旦標(biāo)簽數(shù)量超過了354時,則使用分組幀時隙ALOHA算法,來限制系統(tǒng)內(nèi)的響應(yīng)的標(biāo)簽數(shù)量。過程如圖4所示。


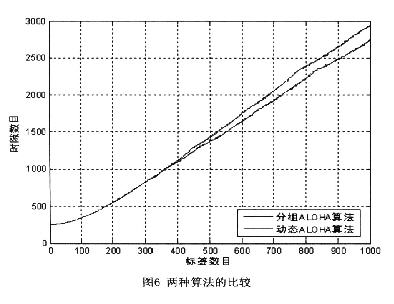
對提出的算法進(jìn)行了仿真。結(jié)果表明:當(dāng)標(biāo)簽數(shù)小于354時,分組幀時隙ALOHA算法采用動態(tài)幀時隙ALOHA算法;當(dāng)標(biāo)簽數(shù)大于354時,分組幀時隙ALOHA算法對標(biāo)簽數(shù)進(jìn)行分組識別。所以標(biāo)簽數(shù)越多,分組幀時隙ALOHA算法所使用的時隙數(shù)越少,效率越高。如圖6所示。
4 結(jié)束語
本文基于ALOHA算法,分別對幀時隙算法和動態(tài)幀時隙算法進(jìn)行研究和分析,并提出一種利用二進(jìn)制樹形分組的時隙ALHOA算法。對提出的分組算法和傳統(tǒng)的動態(tài)幀時隙算法進(jìn)行比較。當(dāng)標(biāo)簽數(shù)過大時,采用此方法有利于提高系統(tǒng)效率,并減少了計算和操作的復(fù)雜度。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。