
基于TMS320C6418的成像制導仿真系統設計
尹哲春 張福欣 馬紅艷
摘要: 介紹了基于DSP處理器的成像制導圖像生成仿真系統,并在某導引頭仿真系統中得到應用,真實模擬出導引頭搜索、捕獲目標的全過程。該仿真系統可以對導引頭的目標識別能力和制導能力給出判斷,并由此改進目標識別系統,從而提高精確制導的能力。隨著精確制導武器系統的發展,基于DSP的成像制導仿真必將取得越來越大的進展,發揮越來越重要的作用。
Abstract:
Key words :
1 成像制導仿真系統設計
1.1 系統的組成
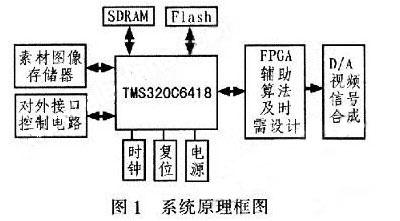
為了能夠實現仿真圖像的實時顯示,在設計DSP視頻生成系統時,DSP的選擇該系統設計的關鍵,為此這里選用TMS320C6418型DSP。以TMS320C6418為核心的圖像生成仿真系統的系統原理框圖,如圖1所示。
1.2 系統工作原理
系統初始化時通過DSP將素材圖像送入存儲器SDRAM等待DSP處理,再由FPGA產生的行同步、場同步信號的控制下將處理后的圖像數據通過DsP的EDMA通道送入FPGA的RAM中,在FPGA產生復合同步信號和復合消隱信號的控制下圖像數據經D/A轉換后,合成為標準的模擬視頻信號。
1.3 基于DSP的系統硬件特性
DSP處理系統實現對圖像數據的處理,是整個系統的核心。它由DSP器件TMS320C6418、圖像存儲器SDRAM、程序存儲器FLASH構成。
TMS320C6418通過外部存儲器接口(EMIF)與SDRAM、FLASH和FPGA連接,構成典型的嵌入式DSP應用系統。TMS320C6418是TI公司新推出的TMS320C64xx系列的一種,主要特點為:片內512K字節RAM;操作速度高達600MHz;支持多種外部存儲器接口,包括SRAM,SDRAM,RAOM,FIF-0;增強的EDMA控制器,有64個EDMA通道。
在實時圖像數字處理器中,采用SDRAM存儲圖像數據有2個優點:一是速度高,存取時間可達8 ns;二是單片容量大,有利于減少圖像處理系統的體積。
對于DSP處理系統,必須擴充片外程序存儲器,這里選用的是FLASH存儲器。TMS320C6418的RAM(L2)容量達到512 KB,而DSP系統的應用程序通常不是特別大,因此,在系統上電以后將使用的程序裝載到L2中,這樣可以提高程序的訪問速度。
1.4 基于DSP的系統成像制導仿真圖像生成軟件
1)DSP初始化程序 完成上電復位以后的初始化工作,主要包括對外部存儲器件SDRAM、FLASH的配置和初始化及將素材圖像數據搬入SDRA-M。
2)DSP系統圖像數據的傳輸程序 在圖像生成中存在大量的數據傳輸,包括:目標和背景數據傳輸,以實現圖像數據的融合處理;SDRAM與DSP內部RAM的數據傳輸,以實現目標提取的處理;SDRAM與FPGA的RAM的數據傳輸,以實現視頻圖像的實時顯示。
3)圖像處理程序 根據圖像的特點選擇合適的圖像處理算法,提取目標,給控制端提供脫靶量,以實現圖像的閉環跟蹤。
4)制導控制程序 根據外部輸入的輸入條件,即跟蹤、掃描等命令,使其能夠模擬導引頭工作時真實場景的動態變化。
2 成像制導仿真圖像生成關鍵技術
2.1 背景和目標的模型建立
目標是指軍事武器作戰的對象物,而背景是除目標之外的一切空間物質。目標與背景是相對的,同一物體有時可以成為目標,有時也可以是背景。對于成像制導而言,根據目標與背景所在地理位置高度或性質的不同,可把目標與背景分成3類:空中目標與天空背景、海面目標與海洋背景、地面目標與地物背景。
背景圖像的生成可以使用形狀規則的矩形光柵圖像,例如帶有天空和地面的*.bmp位圖圖像。在某些特定的場景中還需要花、草、樹、汽車、房屋等不規則形狀的目標光柵圖像,例如要在已有的場景中生成一顆大樹,如何才能透過樹葉和枝桿的縫隙看到后面的景物。這在DSP中沒有專門的函數來進行處理。但可采用以下方法實現:
1)首先用3DMAX軟件生成所需要的花、草、汽車等,生成文件為*.BMP位圖文件格式,用PHOTOSHOP軟件將感興趣的圖像將其對比度、亮度加以調整。將其位圖圖像做成矩形,便于DSP算法處理。
2)背景與目標的融合,確定目標的位置后,需要把背景和目標融合起來。但是由于背景與目標之間存在亮度差,如果簡單地重疊,就會出現明顯的縫隙。為了達到無縫融合,把背景與目標重合區域的邊緣按一定的加權值合成為新的邊緣。

式中,Inew為合成的新的邊緣圖像,I1和I2為目標與背景重疊區域的邊緣圖像,w為加權系數。
設重疊邊緣區域的寬度為d,那么拼接的圖像,I1隨著向I2的過渡,w由0→1,增量為1/d呈線性變化。該算法實現了目標與背景邊緣的均勻過渡,達到很好圖像無縫融合的效果。
3)對生成的圖像進行濾波處理。
2.2 素材圖像數據的生成
各種各樣的背景圖像和目標圖像存放在存儲器中,這就要將所取得素材轉換成數字圖像然后通過燒寫程序將這些素材通過DSP燒寫到存儲器中。
1)將素材用軟件轉換成TI CCSTudio調試軟件能夠識別的數據格式。具體格式如圖2所示。
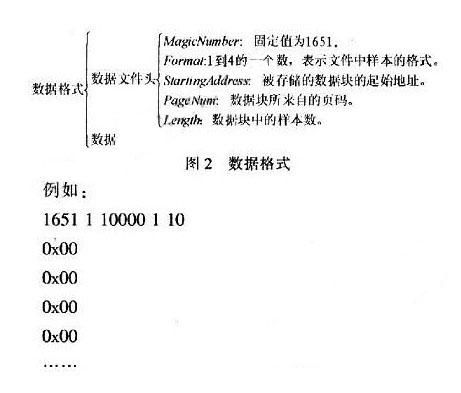
2)通過CCStudio的File一>Data一>Load菜單將素材數據裝入相應的地址空間。
3)通過編寫的燒寫程序將素材數據固化到存儲器相應的地址空間。
3 導引回路圖像的實時仿真
要真實地仿真作戰環境,就必須考慮目標的各種運動規律。描述目標的運動可以有3種方法:1)目標運動,導引頭框架不動;2)目標不動,導引頭框架運動;3)目標和導引頭框架同時運動。
在人工捕獲目標的導彈仿真回路中,一般情況下目標是固定的,靠人工操作控制導彈搜索、跟蹤目標,因此本文采用方法第2種方法(即目標不動,導引頭框架運動)來進行圖像仿真。仿真過程如圖3所示。
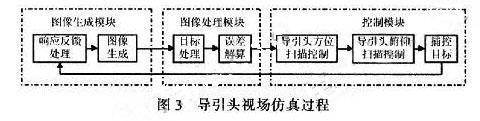
仿真圖像生成后將圖像送入圖像處理模塊,圖像處理模塊運用圖像處理和識別技術完成目標的檢測、識別和跟蹤,并根據目標方位,給出相應的誤差信號;控制模塊根據相應的控制命令進行導引頭的方位和俯仰掃描,一旦發現目標立即轉入跟蹤狀態進行跟蹤,同時計算導引頭的位置和姿態參數;導引頭的調整結果作為反饋被送回仿真視場圖像生成模塊,該模塊根據反饋信號計算生成下一幅圖像。仿真的實際效果圖如圖4所示。
4 結束語
介紹了基于DSP處理器的成像制導圖像生成仿真系統,并在某導引頭仿真系統中得到應用,真實模擬出導引頭搜索、捕獲目標的全過程。該仿真系統可以對導引頭的目標識別能力和制導能力給出判斷,并由此改進目標識別系統,從而提高精確制導的能力。隨著精確制導武器系統的發展,基于DSP的成像制導仿真必將取得越來越大的進展,發揮越來越重要的作用。
此內容為AET網站原創,未經授權禁止轉載。