
多自由度的控制是一個復(fù)雜,而具挑戰(zhàn)性的。Energid開發(fā)的Actin 是 C++ 軟件工具箱,它通過提供軟件組件和控制方法使復(fù)雜的機械控制和模擬簡單化。Actin 軟件最初是為美國宇航局設(shè)計的,它可以為上百個運動部件組成的固定和移動的機器人提供協(xié)調(diào)控制的Windows基礎(chǔ)的庫。 軟件設(shè)計人員運用庫可以很快地設(shè)計出復(fù)雜,智能型的控制系統(tǒng)。軟件設(shè)計人員還可以指定機器人做所希望的運動學(xué)動作,Actin 自動生成算法從而設(shè)定關(guān)節(jié)的位置和速度實現(xiàn)指定的機械手的運動。
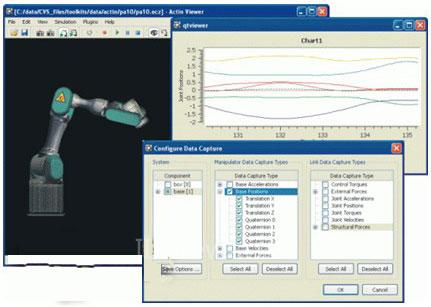
ACTIN 機器人學(xué)工具箱界面
借助于Actin, 機器人專家們可以把精力放在機器人該做什么,手和工具應(yīng)該放在哪,而不是該怎樣實現(xiàn)所要求的動作。對于具有很多運動部件的復(fù)雜的機械結(jié)構(gòu),機械手實現(xiàn)一種動作,機械臂可以有不同運動的方法。比如說,人的手臂,手的位置和方向一定時,肘部可以有不同的運動。Actin就是利用這種運動學(xué)的冗長性自動生成智能控制,包括避開碰撞,關(guān)節(jié)角度的限值。能量最小運動和抵抗環(huán)境外力的能力最優(yōu)化。
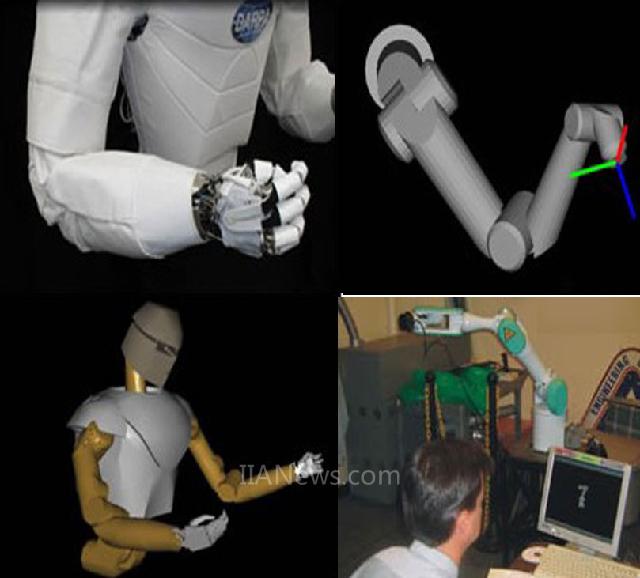
通過可設(shè)置的面向?qū)ο蟮脑O(shè)計, Actin 可以應(yīng)用于多種機器人。它可以既可以應(yīng)用于固定式的工業(yè)機器人,比如說,工廠自動生產(chǎn)線的機器人。也可以應(yīng)用于移動式的機器人,比如說,家庭和娛樂用機器人。Actin適用于很多種型式關(guān)節(jié)和手。 它可以仿真和控制無限個自由度和分支聯(lián)接的結(jié)構(gòu)。
ACTIN 工具箱的優(yōu)點
·協(xié)調(diào)控制– 可應(yīng)用于固定和移動機器人
·智能型運動– 能夠避免碰撞,抵抗外力最優(yōu)化
·前所未有的靈活性– XML為基礎(chǔ)的設(shè)定使Actin能夠快速的變化以適應(yīng)工作要求
·降低設(shè)計成本 – Actin 的交叉平臺,C++接口和容易使用的優(yōu)化控制結(jié)構(gòu)賦予設(shè)計者更大的能力
· 快速設(shè)計檢驗–SolidWorks 能夠被用于設(shè)計和模擬。只需簡單操作就可使設(shè)計合理性得到檢驗
·程序的重復(fù)使用性– 為一種應(yīng)用開發(fā)的控制算法可以應(yīng)用于其它的方面
·交叉平臺的技術(shù)支持– 可支持Linux and Windows
ACTIN 工具箱的能力包括
·動態(tài)模擬任何臺數(shù)的機器人
·蒙地卡羅(Monte Carlo)仿真分析
·模擬柔性關(guān)節(jié)• 視覺演示機器人
· 控制系統(tǒng)的表達(dá)用可擴展標(biāo)記語言(XML)
· 生成 XML 格式描述控制系統(tǒng)
· 控制系統(tǒng)通過網(wǎng)絡(luò)連接和通信
· 可以結(jié)合機械視覺
·可執(zhí)行力的控制
ACTIN 工具箱的控制算法
· 碰撞避免
·關(guān)節(jié)角度限值避免
·特異性避免
·誤差減少
·抵抗外力能力優(yōu)化
·最小動能控制
·最小潛能控制 失敗恢復(fù)
·仿真為基礎(chǔ)的控制
·用戶定義
關(guān)于Energid Technologies
Energid Technologies是一家重點解決具有挑戰(zhàn)性問題的機器人和機械視覺工程學(xué)的公司。客戶包括機器人制造商,美國國防部多個分機構(gòu),和美國宇航局的多個研究中心。 公司成立于2001年,總部在美國馬薩諸塞州的劍橋。更詳細(xì)的情況,請訪問 www.energid.com.