
1 智能救援機器人的硬件設計
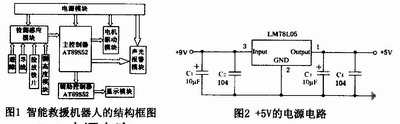
該智能救援機器人主要由電源模塊、檢測感應模塊(實現巡線、避障、撿放硬幣、測距功能)、聲光報警模塊、控制器模塊、電機驅動模塊、顯示模塊六部分組成,其結構框圖如圖1所示。
1.1 電源電路
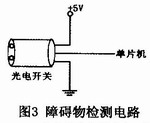
智能救援機器人全部能量來源于位于機器人底部的六節五號電池,經過傳統的7805穩壓電路給其單片機及外圍傳感器供電,其電路如圖2所示。部分傳感器采用5V低電壓供電可以避免機器人過早檢測障礙物而停止前進。
1.2 檢測感應模塊
1.2.1 巡線電路
巡線模塊我們采用紅外對管。紅外對管由LED和光電三極管組成,光電三極管根據從地面反射回來的LED的光的強度而改變積極基極電流。在光電三極管基極接一上拉電阻,則可根據基極電壓的測量判斷反射光的強弱,強光說明探測器下方是白色,弱光說明下方光較弱,大部分光被黑線吸收。對于輸出的模擬信號,我們將其引入五個電壓比較器LM339進行處理。電壓比較器LM339的一輸入端接紅外對管,另一端接滑動變阻器,通過對滑動變阻器的調節可以實現對紅外對管對黑線的靈敏度。比較器LM339的另一端接上拉電阻后進入單片機進行探測。
1.2.2 避障電路
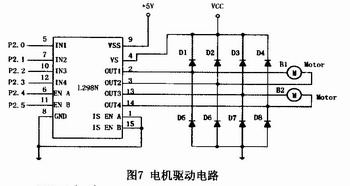
避障部分采用光電開關,將其安放在機器人需要測量的各個方向。為減少它的測量距離保證機器人的正常運行,我們采用的是低電壓5V供電,供電電壓雖略顯不足,但能保證它的正常短距離探測。光電開關的信號線的高低電平可反映前方障礙物的有無,障礙物檢測電路如圖3所示。
1.2.3 超聲波測距電路
由于超聲波執行性強、能量消耗慢、在介質中傳播距離較遠的特點。我們采用DIP-ME007超聲波測距模塊完成高度的測量功能,其電路板如圖4所示。DIP-ME007超聲波測距模塊能比較迅速、方便地測出橋底部距測距模塊之間的距離,此模塊共有五個引腳VCC、tring、echo、 out、GND。DIP-ME007超聲波測距模塊輸出為pwm方式,VCC、GND接好后向tring發一個10 s以上的高電平,就可以在接收口echo等待高電平輸出。單片機采用跳變沿觸發,觸發后即開始計時。當電平變低后即開始讀定時器,此時的值即為此次測距所用的時間。根據S=Ct/2即可得出所測得的距離。如此周期性測量即可實現移動測距。單片機內部自動將測得數據保存并與上一次測距結果比較,保留最大值,當連續五次未測得大于前一次的數據時停止檢測并記錄最大值。當再次檢測到黑線即已成功過橋,是時單片機控制顯示模塊將測得的最大值在液晶屏上顯示出來。

1.3 控制器電路
由于主控制器的任務較多,電路要求引腳較多,且顯示器的控制程序較為復雜,我們單獨配備了一個同樣的單片機作為主控制器的輔助部分,通過它來分擔主控制器的工作,來完成顯示部分的工作。其中主控制器與其它模塊的連接如圖5所示。

1.4 聲光報警電路
聲光報警模塊主要應用于搜救報警電路中,同時為進一步擴展應用,我們在控制其開關的同時引入另一條信號線實現了對聲音的控制。在搜救過程和平安到達安置區時經采用不同頻率和音色的聲音給出表示。尋找硬幣我們采用金屬探測傳感器,當發現金屬時,其信號線上電平從低電平變為高電平,觸發單片機中斷,在單片機的控制下機器人停止運動,啟動音樂發生模塊并點亮LED進行聲光報警,具體實現電路如圖6所示。
1.5 電機驅動電路
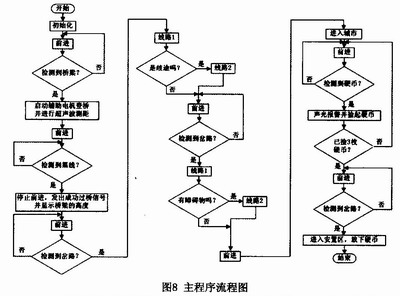
單片機通過傳感器的反饋信號控制電機正轉、反轉或者停止,來實現控制機器人完成各種動作。L298N是專用電機驅動芯片,他可以實現電機的正反轉、剎車、pwm調速等多種功能,是對機器人電機進行控制的比較理想的芯片,因此我們采用L298N芯片對兩個普通電機進行控制。通過編程完全可以控制實現題目的基本要求和發揮部分,也可增加各種創新功能。L298N芯片信號電源與驅動電源的分開,可以根據需要對電機的電壓進行調節,其驅動電路如圖 7所示。
1.6 顯示電路
采用MSl602C-1型LCD顯示相應的信息。此顯示器模塊的工作電壓為5V左右,支持顯示2行字符,每行可顯示16個字符,每個字符由5×7點陣顯示。可以通過編程實現多種顯示,顯示信息比數碼管更多,顯示效果更好。由于主控制器的單片機任務較多,電路接線較復雜,我們采用單獨的單片機控制顯示模塊。
2 智能救援機器人的軟件設計
本智能救援機器人的軟件控制部分采用C語言編程,借助C語言的強大功能來實現單片機AT89S52" title="AT89S52">AT89S52的控制功能。主程序流程圖如圖8所示。
3 結論
以AT89S52單片機為核心部件,利用紅外傳感檢測、電機控制等技術,通過各種方案的討論及嘗試,再經過多次的整體軟硬件結合調試,不斷地對系統進行優化,最后智能救援機器人可以實現;避開障礙物,并尋找到合適的路徑;順利通過受損的橋梁,并能較準確地測出橋梁的高度;自動識別路線狀況,并根據實時狀況快速做出判斷,準確控制機器人的轉向;自動顯示所要求的信息;自動尋線前進,能智能檢測、撿起、放下硬幣;聲光報警,并有彩燈閃爍;行駛到規定的地點自動停止并顯示救援結束。
在設計過程中,力求硬件電路簡單,外形美觀,充分發揮軟件設計的優勢來滿足系統的要求。